Содержание статьи

Функция odeint из библиотеки SciPy предназначена для численного решения систем обыкновенных дифференциальных уравнений. Она используется при моделировании физических, биологических и экономических процессов, где требуется рассчитать изменение параметров во времени.
При работе odeint применяет алгоритмы адаптивного шага, основанные на методах Ливермора, что позволяет автоматически выбирать длину шага интегрирования для достижения заданной точности. Пользователь задаёт систему уравнений в виде функции, которая возвращает производные, а также массив начальных условий и диапазон времени.
Для повышения точности вычислений можно управлять параметрами rtol и atol, определяющими относительные и абсолютные погрешности. Кроме того, функция поддерживает передачу дополнительных аргументов через параметр args, что удобно при решении задач с несколькими переменными коэффициентами.
Функция odeint возвращает массив значений, соответствующий каждому моменту времени из заданного диапазона, что позволяет визуализировать динамику системы или использовать результаты в дальнейших расчётах. Такой подход делает её основным инструментом при анализе моделей с зависимыми параметрами.
Назначение функции odeint и область её применения

Функция odeint применяется для численного решения систем обыкновенных дифференциальных уравнений первого порядка. Она позволяет получать траектории изменения параметров во времени без ручного вычисления интегралов. В её основе лежит адаптированный метод Ливермора (LSODA), автоматически выбирающий между неявными и явными схемами в зависимости от жёсткости системы.
Функция используется в задачах, где требуется моделирование динамики систем с непрерывным изменением состояния. Применение odeint удобно в исследованиях, где невозможно получить аналитическое решение уравнений.
- Моделирование движения тел под действием сил (например, колебания маятника, движение спутника, система «масса-пружина»).
- Рассчёт химических реакций и кинетики веществ, когда скорость реакции зависит от текущих концентраций.
- Анализ биологических процессов: распространение инфекций, рост популяций, изменение концентрации веществ в организме.
- Экономическое моделирование динамики показателей, зависящих от времени – инфляции, инвестиций, спроса.
Использование odeint оправдано, когда необходимо рассчитать значения функции в большом числе временных точек при сохранении контролируемой точности. Она интегрируется с NumPy и Matplotlib, что позволяет не только решать уравнения, но и сразу визуализировать полученные результаты.
Передача исходных данных и параметров в odeint
Для работы функции odeint необходимо определить три основных компонента: функцию, описывающую систему уравнений, массив начальных значений и диапазон времени интегрирования. Все элементы должны быть согласованы по размерности и типу данных.
Функция, передаваемая в odeint, должна принимать два аргумента: вектор текущих значений y и момент времени t. Она возвращает массив производных, рассчитанных на основе текущего состояния системы. Пример минимальной функции:
def model(y, t):
dy_dt = -0.5 * y
return dy_dt
Начальные условия задаются в виде массива y0, содержащего стартовые значения всех переменных. Временные точки определяются в виде массива t, созданного, например, с помощью numpy.linspace(). Эти данные передаются в вызов:
result = odeint(model, y0, t)
Если уравнение зависит от дополнительных параметров, их можно передать через аргумент args в виде кортежа. В этом случае функция модели должна принимать дополнительные аргументы, например:
def model(y, t, k):
dy_dt = -k * y
return dy_dt
result = odeint(model, y0, t, args=(0.3,))
Для корректной работы рекомендуется использовать тип float64 для всех числовых значений и контролировать длину массива времени, чтобы избежать избыточных вычислений. Такие меры повышают стабильность и точность решения.
Структура уравнений, решаемых при помощи odeint

Функция odeint решает системы обыкновенных дифференциальных уравнений первого порядка, которые имеют общий вид:
dy/dt = f(y, t, ...)
Каждое уравнение описывает изменение переменной во времени через зависимость от текущего состояния системы. Если исходная задача содержит уравнения второго или более высокого порядка, их необходимо привести к системе первого порядка. Это делается путём введения новых переменных для каждой производной.
Например, уравнение второго порядка d²y/dt² = -k*y преобразуется в систему:
y₁ = y
y₂ = dy/dt
dy₁/dt = y₂
dy₂/dt = -k*y₁
После преобразования модельная функция для odeint должна возвращать список или массив из всех производных:
def system(y, t, k):
dy1 = y[1]
dy2 = -k * y[0]
return [dy1, dy2]
Важно соблюдать согласованность размерности: длина возвращаемого массива должна соответствовать количеству уравнений в системе. Порядок следования элементов должен быть одинаковым во всех частях кода, иначе результат будет некорректным.
При работе с несколькими уравнениями рекомендуется использовать векторные операции библиотеки NumPy для ускорения вычислений и сокращения кода, особенно при моделировании систем с десятками переменных.
Настройка шага интегрирования и точности вычислений
Функция odeint использует внутренний алгоритм LSODA, который автоматически регулирует шаг интегрирования в зависимости от поведения системы. Однако параметры точности можно контролировать вручную с помощью аргументов rtol и atol.
Параметр rtol задаёт относительную погрешность, а atol – абсолютную. При малых значениях этих параметров интегратор выполняет больше итераций и уменьшает шаг времени, повышая точность решения. Пример настройки:
result = odeint(model, y0, t, rtol=1e-6, atol=1e-9)
Слишком жёсткие значения допуска могут вызвать избыточное количество итераций и увеличить время расчёта. Оптимальные значения зависят от характеристик конкретной задачи: для большинства систем подходят rtol=1e-5 и atol=1e-8.
Массив временных точек t также влияет на шаг интегрирования. Чем плотнее точки расположены, тем больше промежуточных вычислений выполнит odeint. Для задач с резкими изменениями параметров рекомендуется использовать неравномерную сетку времени с более мелкими шагами на критических участках.
При работе с жёсткими системами уравнений важно убедиться, что модель корректно описывает переходные процессы. При необходимости можно провести тестирование с разными значениями rtol и atol, сравнив результаты по стабильности и форме графика.
Использование аргументов args для передачи дополнительных параметров

Функция odeint позволяет передавать в функцию правой части ОДУ дополнительные параметры через аргумент args. Это особенно полезно, когда уравнение зависит от констант или внешних факторов, которые не входят в вектор состояния.
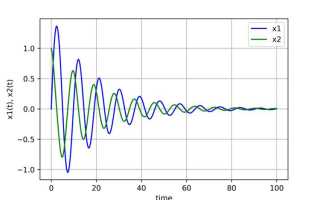
Пример: рассмотрим уравнение затухающих колебаний
m * y» + c * y’ + k * y = 0
Преобразуем его в систему первого порядка:
y0 = y, y1 = y’
y0′ = y1
y1′ = -(c/m) * y1 — (k/m) * y0
Определяем функцию для odeint:
def damped_oscillator(y, t, m, c, k): y0, y1 = y dydt = [y1, -(c/m)*y1 - (k/m)*y0] return dydt
Для передачи параметров используем args:
from scipy.integrate import odeint params = (1.5, 0.2, 4.0) # m, c, k y_initial = [1.0, 0.0] # начальные значения y и y' t = np.linspace(0, 10, 100) solution = odeint(damped_oscillator, y_initial, t, args=params)
Аргумент args должен быть кортежем. Порядок элементов в кортеже соответствует порядку параметров в функции. Передача списка или словаря напрямую вызовет ошибку.
Рекомендации:
| Ситуация | Совет |
|---|---|
| Много дополнительных параметров | Группировать их в кортеж и передавать через args, чтобы не менять сигнатуру функции. |
| Неизменяемые параметры | Использовать кортеж, так как он защищает от случайного изменения внутри функции. |
| Параметры с именами | Если требуется передавать по именам, использовать замыкание или functools.partial вместо args. |
| Комплексные зависимости | Определять отдельную функцию или класс для подготовки параметров и вычисления правой части. |
Использование args упрощает тестирование и позволяет легко изменять параметры без изменения основной функции интегрирования.
Интерпретация результатов, возвращаемых функцией odeint

Функция odeint возвращает массив с численными значениями решений системы ОДУ для каждого времени из массива t. Размерность массива соответствует количеству точек и переменных состояния.
Структура возвращаемого массива:
- Каждая строка соответствует конкретному моменту времени из
t. - Каждый столбец соответствует компоненте вектора состояния.
- Для системы с
nпеременными иmточками времени возвращается массив размером(m, n).
Пример интерпретации:
t = np.linspace(0, 5, 50) y0 = [1.0, 0.0] solution = odeint(damped_oscillator, y0, t, args=(1.5, 0.2, 4.0)) y_position = solution[:, 0] # значения y y_velocity = solution[:, 1] # значения y'
Рекомендации для анализа:
- Проверять соответствие размеров массива:
solution.shapeдолжен совпадать с(len(t), len(y0)). - Для построения графиков использовать отдельные массивы для каждой переменной:
solution[:, i]. - При сложных системах создавать словарь или DataFrame для наглядного доступа к компонентам состояния.
- Проверять физический смысл решений: отрицательные значения там, где их быть не должно, могут указывать на ошибки в формулировке уравнения или выборе параметров.
- Использовать срезы для анализа конкретных интервалов времени без пересчета всей системы.
Дополнительно:
- С помощью
solution[-1]можно получить значения состояния в конце интервала интегрирования. - Сравнение нескольких решений при различных параметрах позволяет анализировать чувствительность системы.
- Если требуется интеграция с событиями, интерпретировать результаты в контексте изменения условий или переходных точек.
Правильная интерпретация массива solution обеспечивает точное извлечение данных для визуализации, анализа динамики и проверки корректности модели.
Примеры решения систем дифференциальных уравнений с odeint
Пример 1. Затухающие колебания:
import numpy as np from scipy.integrate import odeint def damped_oscillator(y, t, m, c, k): y0, y1 = y dydt = [y1, -(c/m)*y1 - (k/m)*y0] return dydt m, c, k = 1.5, 0.2, 4.0 y0 = [1.0, 0.0] t = np.linspace(0, 10, 200) solution = odeint(damped_oscillator, y0, t, args=(m, c, k)) y_position = solution[:, 0] y_velocity = solution[:, 1]
Пример 2. Система Лотки–Вольтерры (хищник–жертва):
def lotka_volterra(z, t, alpha, beta, delta, gamma): x, y = z dxdt = alpha*x - beta*x*y dydt = delta*x*y - gamma*y return [dxdt, dydt] alpha, beta, delta, gamma = 1.1, 0.4, 0.1, 0.4 z0 = [10, 5] t = np.linspace(0, 50, 500) solution = odeint(lotka_volterra, z0, t, args=(alpha, beta, delta, gamma)) prey = solution[:, 0] predator = solution[:, 1]
Пример 3. Система трех уравнений для химической реакции A → B → C:
def reaction(y, t, k1, k2): A, B, C = y dAdt = -k1*A dBdt = k1*A - k2*B dCdt = k2*B return [dAdt, dBdt, dCdt] k1, k2 = 0.3, 0.1 y0 = [1.0, 0.0, 0.0] t = np.linspace(0, 20, 200) solution = odeint(reaction, y0, t, args=(k1, k2)) A_conc = solution[:, 0] B_conc = solution[:, 1] C_conc = solution[:, 2]
Рекомендации при решении систем:
- Выбирать
tс достаточной плотностью точек для точной аппроксимации решения. - Начальные условия должны соответствовать физическому смыслу задачи.
- Передавать все константы через
argsдля удобства изменения параметров без модификации функции. - Для анализа решений создавать отдельные массивы по компонентам:
solution[:, i]. - Проверять корректность результатов с аналитическими решениями при возможности.
Вопрос-ответ:
Что возвращает функция odeint при интегрировании системы дифференциальных уравнений?
Функция odeint возвращает массив численных значений решения для каждого момента времени из переданного массива t. Строки соответствуют точкам времени, столбцы — компонентам вектора состояния. Для системы из n уравнений и m точек времени массив имеет форму (m, n).
Как передать дополнительные параметры в функцию, используемую в odeint?
Для передачи констант и внешних параметров используется аргумент args. Его значение — кортеж, элементы которого соответствуют параметрам функции. Например, для функции f(y, t, a, b) можно вызвать odeint(f, y0, t, args=(a, b)). Порядок элементов в кортеже должен совпадать с порядком параметров в функции.
Можно ли использовать odeint для систем с более чем двумя уравнениями?
Да, odeint поддерживает системы любой размерности. Вектор состояния y0 должен содержать начальные значения для всех переменных. Решение возвращается в виде массива, где каждая строка соответствует времени, а каждый столбец — компоненте состояния. Для удобства анализа можно создавать отдельные массивы по столбцам или использовать структуры данных, например, pandas DataFrame.
Как интерпретировать отрицательные значения в результатах odeint?
Отрицательные значения могут быть корректными, если система допускает отрицательные состояния, например, для скорости или отклонений. Если же физический смысл переменной не допускает отрицательных значений, это указывает на ошибку в формулировке уравнения, выборе параметров или начальных условий. Рекомендуется проверять диапазоны решений и корректность функции правой части.