Определение принадлежности точки области на плоскости является ключевым этапом в геометрическом анализе данных, компьютерной графике и геоинформационных системах. На практике проверка выполняется для различных типов областей: прямоугольников, окружностей, многоугольников и криволинейных фигур. Для прямоугольных областей достаточно сравнения координат точки с границами по осям X и Y, а для окружностей – вычисления расстояния от центра до точки и сравнения его с радиусом.
Для сложных многоугольников применяются алгоритмы типа «луч-отсечение» или подсчет пересечений сторон с лучом, исходящим из точки. Важно учитывать порядок обхода вершин и корректно обрабатывать случаи, когда точка лежит на границе области. Для криволинейных областей чаще всего используется аппроксимация сплайнами или разбиение фигуры на простые составляющие, что обеспечивает баланс между точностью и производительностью.
Реализация проверки принадлежности точки требует выбора подходящей структуры данных. Для статических областей эффективны массивы координат вершин или матрицы, а для динамически изменяемых фигур лучше использовать деревья сегментов или пространственные индексы. В численных расчетах необходимо учитывать точность вычислений с плавающей запятой, чтобы избежать ошибок при сравнении координат, особенно вблизи границ.
Для оптимизации массовой проверки множества точек над одной областью рекомендуется предварительно вычислить габаритный прямоугольник фигуры и исключать точки вне него, что сокращает количество сложных операций. В случаях с регулярными сетками и плотными областями можно применять методы растровой маски или булевы операции с битовыми массивами, обеспечивая высокую скорость обработки больших данных.
Определение координат точки для анализа
Для точного определения принадлежности точки области на плоскости необходимо сначала зафиксировать координаты в единой системе отсчета. Рекомендуется использовать декартову систему с ориентацией X вправо и Y вверх. Координаты следует записывать с точностью не менее четырёх знаков после запятой для минимизации ошибок при вычислении. Например, для точки, расположенной близко к границе области, значения могут быть следующими:
| Точка | X | Y |
|---|---|---|
| P1 | 12.3456 | 7.8910 |
| P2 | 0.0001 | -5.4321 |
| P3 | -3.2100 | 4.5678 |
После фиксации координат следует проверить корректность их занесения. Если данные получены из измерительных приборов, важно учесть возможное смещение нуля и систематическую погрешность. Для анализа больших массивов точек рекомендуется использовать табличное представление с колонками X и Y, что позволяет быстро применять алгоритмы проверки принадлежности, включая метод сканирующих линий или алгоритм обхода многоугольника по вершинам. В таких таблицах также удобно вести дополнительные колонки для обозначения принадлежности точки внутренней или внешней области после вычислений.
Использование уравнений прямых для проверки внутри многоугольника
Для проверки принадлежности точки многоугольнику часто применяют уравнения прямых, формируя систему неравенств, соответствующих каждому ребру. Каждое ребро с координатами вершин (x₁, y₁) и (x₂, y₂) описывается уравнением вида (y — y₁)(x₂ — x₁) — (x — x₁)(y₂ — y₁) = 0, где знак выражения указывает положение точки относительно ребра.
Для выпуклого многоугольника достаточно проверить, что точка лежит с одной и той же стороны от всех ребер. Практически это означает вычисление значения выражения для каждой прямой и сравнение знака с заранее выбранным ориентиром, например, для первой вершины. Несоответствие знаков сразу показывает, что точка вне многоугольника.
Если многоугольник невыпуклый, метод сохраняет актуальность при разбиении фигуры на выпуклые подмногоугольники. Каждое подмногоугольное ребро проверяется отдельно. Для оптимизации вычислений полезно хранить предвычисленные коэффициенты A = y₂ — y₁, B = x₁ — x₂ и C = x₂y₁ — x₁y₂, чтобы не пересчитывать их при каждой проверке.
Точность вычислений критична при использовании плавающей точки. Для координат с плавающей точкой рекомендуется ввести порог ε, например ε = 1e-9, чтобы корректно обрабатывать случаи, когда точка лежит на границе ребра и результат выражения близок к нулю.
Эффективность метода повышается при работе с большим количеством точек. Коэффициенты прямых можно хранить в массиве и обрабатывать точки пакетно. Это особенно удобно для алгоритмов визуализации или геопространственного анализа, где требуется проверка сотен и тысяч координат одновременно.
Для интеграции с системами GIS или CAD важно учитывать ориентацию вершин. Против часовой стрелки значения выражений сохраняют один знак внутри многоугольника, по часовой стрелке – противоположный. Этот факт позволяет избегать лишних вычислений и упрощает алгоритмы обработки.
Метод легко комбинируется с другими подходами, например, с тестом луча. Сначала проверяется попадание в ограничивающий прямоугольник, затем выполняется проверка уравнениями прямых. Такая последовательность сокращает количество операций и уменьшает вероятность ошибок при обработке сложных форм.
Для практического применения рекомендуется реализовать функцию, принимающую массив вершин и координаты точки, возвращающую логическое значение принадлежности. Использование заранее вычисленных коэффициентов и аккуратная работа с ε обеспечивают стабильность и высокую скорость проверки для любых многоугольников, включая сложные выпуклые и невыпуклые фигуры.
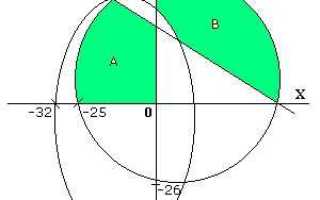
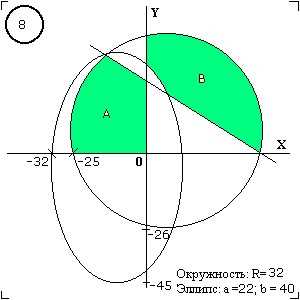
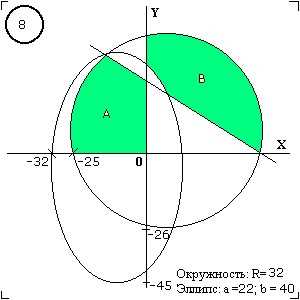
Проверка принадлежности точки кругу или эллипсу
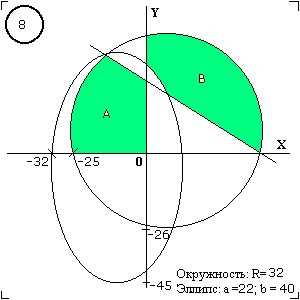
Для круга с центром в точке (x₀, y₀) и радиусом R проверка принадлежности точки (x, y) выполняется по формуле:
(x — x₀)² + (y — y₀)² ≤ R²
Если неравенство выполняется, точка находится внутри круга или на его границе. Использование квадратов расстояний исключает вычисление корня, ускоряя проверку в больших массивах данных.
Для эллипса с центром (x₀, y₀), полуосями a и b по осям X и Y формула проверки выглядит так:
((x — x₀)² / a²) + ((y — y₀)² / b²) ≤ 1
Неравенство определяет, лежит ли точка внутри эллипса. Если значение равно 1, точка на границе; если меньше 1 – внутри; больше 1 – вне эллипса.
При реализации алгоритмов важно учитывать точность вычислений. Для координат с плавающей запятой рекомендуется использовать ε-толерантность, чтобы избежать ошибок из-за округления, особенно на границах:
((x — x₀)² / a²) + ((y — y₀)² / b²) ≤ 1 + ε
В случае больших массивов точек оптимально заранее вычислять обратные квадраты полуосей, чтобы каждый раз не выполнять деление. Это особенно актуально для реального времени или интерактивной визуализации.
Если необходимо определить, находится ли точка строго внутри фигуры, можно исключить равенство с границей:
- Круг: (x — x₀)² + (y — y₀)² < R²
- Эллипс: ((x — x₀)² / a²) + ((y — y₀)² / b²) < 1
Для ориентированных эллипсов, повернутых на угол θ относительно осей координат, используется преобразование координат:
x’ = (x — x₀)cosθ + (y — y₀)sinθ
y’ = -(x — x₀)sinθ + (y — y₀)cosθ
После чего проверка выполняется по стандартной формуле для неориентированного эллипса.
Практическое применение включает проверку попадания курсора в интерактивные зоны, фильтрацию точек в геоинформационных системах и расчет попаданий объектов в игровом пространстве. Своевременная оптимизация формул значительно повышает производительность при больших объемах данных.
Алгоритм лучевого пересечения для сложных областей
Алгоритм лучевого пересечения определяет принадлежность точки многоугольнику путем проведения луча из точки в произвольном направлении и подсчета числа пересечений с границами фигуры. Для сложных областей с выпуклыми и вогнутыми сегментами рекомендуется выбирать горизонтальный или вертикальный луч, чтобы минимизировать пограничные случаи, когда луч проходит точно через вершину. Каждое пересечение увеличивает счетчик, и если итоговое число нечетное – точка находится внутри, четное – снаружи. Для ускорения вычислений используют предварительную фильтрацию по ограничивающему прямоугольнику области, исключая очевидные внешние точки.
При работе с многоугольниками с отверстиями алгоритм модифицируют: внутренние полигональные вырезы учитываются отдельными лучами, и пересечение с ними инвертирует текущий результат. В численных реализациях рекомендуется использовать плавающую точку с точностью не менее 1e-9 и избегать горизонтальных отрезков в качестве границ, чтобы исключить дублированные пересечения. Для областей с тысячами вершин оптимально применять разбиение на сетку или R-деревья для быстрого выявления потенциальных пересечений, что сокращает сложность с O(n) до O(√n)–O(log n) на практических данных.
Применение матричных преобразований для смещённых областей
Для проверки принадлежности точки области, смещённой относительно исходной системы координат, эффективнее использовать аффинные матрицы трансформации. Если область задаётся полигоном с вершинами Vi, смещение на вектор (dx, dy) можно учесть через матрицу:
[[1, 0, dx], [0, 1, dy], [0, 0, 1]]
При применении такой матрицы к координатам точки (x, y) проверка пересчётом сводится к стандартной алгоритмической проверке, например, методом луча или полярного угла, без необходимости переписывать вершины полигона вручную. Это ускоряет обработку больших наборов точек и позволяет интегрировать последовательные смещения и вращения в одну композицию матриц.
Если область подвергается дополнительным линейным преобразованиям, таким как масштабирование или вращение вокруг центра смещённого полигона, рекомендуется сначала построить комбинированную матрицу вида M = T(dx, dy) · R(θ) · S(sx, sy). Точка проверяется путём умножения её однородной координаты на M⁻¹, после чего стандартная проверка принадлежности выполняется в исходной системе. Такой подход снижает численные ошибки при последовательных преобразованиях и упрощает управление сложными трансформациями для динамических областей.
Проверка точек с учётом границ и допусков
Для точной проверки принадлежности точки области на плоскости необходимо учитывать допустимые отклонения при работе с координатами. Рекомендуется задавать ε в диапазоне 10-6–10-9 при использовании double и 10-4–10-5 при float.
Для многоугольников проверка проводится через ориентацию точек относительно каждого сегмента границы. Точка внутри считается такой, если она не выходит за пределы всех сегментов с учётом ε:
- Вычислить вектор от вершины к точке.
- Вычислить вектор сегмента.
- Проверить знак векторного произведения с учётом ε.
Для окружностей и эллипсов точка считается внутри, если расстояние до центра удовлетворяет условию:
- Круг: |(x — x₀)² + (y — y₀)² — R²| ≤ ε
- Эллипс: |((x — x₀)/a)² + ((y — y₀)/b)² — 1| ≤ ε
Сложные криволинейные границы проверяются через аппроксимацию отрезками или сплайнами. Каждая точка анализируется локально с допуском ε для минимизации ошибок.
Для областей с «толстым» контуром вводят внутренний и внешний буфер:
- Внутренний сдвиг внутрь на ε – точка точно внутри.
- Внешний сдвиг наружу на ε – точка вне области.
- Между буферами – точка на границе.
Особое внимание уделяется углам и пересечениям кривых. Локальная проверка через аналитические производные или угловые тесты повышает точность в местах с острыми или почти коллинеарными сегментами.
При массовой проверке полезна многоуровневая фильтрация:
- Сначала bounding box с ε для грубой фильтрации.
- Затем точная проверка по форме.
- Оптимизация снижает вычислительную нагрузку при больших объёмах точек.
Для систем с динамическими областями допустимым считается адаптивный ε, зависящий от масштабов и размеров области. Например, для области размером 1–10 единиц ε = 10-6, для области 100–1000 единиц – ε = 10-4.
Вопрос-ответ:
Какие методы обычно применяются для определения, находится ли точка внутри произвольной фигуры на плоскости?
Существуют несколько подходов. Один из классических — метод лучей: из проверяемой точки проводится луч в любом направлении, и считается количество пересечений с границей фигуры. Если число пересечений нечётное, точка внутри, если чётное — снаружи. Для простых многоугольников также используется метод суммы углов: вычисляется сумма углов между точкой и вершинами многоугольника, если сумма равна 360°, точка внутри, если 0° — снаружи. Кроме того, для кругов или эллипсов проверка может сводиться к подстановке координат точки в уравнение кривой.
Можно ли проверить принадлежность точки сложной фигуре программно без деления на примитивы?
Да, для некоторых сложных областей применяют алгоритмы на основе пространственных структур, например, BSP-деревья или структуры типа R-деревьев. Они позволяют хранить фигуру в виде множества вложенных областей, чтобы быстро определить, попадает ли точка внутрь. При этом не требуется делить фигуру на простые компоненты вручную — алгоритм сам проверяет принадлежность точке соответствующей части структуры.
Что делать, если точка лежит точно на границе фигуры?
Ситуации с точкой на границе обычно рассматриваются отдельно. В некоторых алгоритмах точка на границе считается «внутри», в других — «снаружи». Например, метод лучей может трактовать пересечение с вершиной как дополнительное пересечение, что влияет на результат. В практических приложениях нужно заранее определить, как такие точки будут учитываться, чтобы алгоритм работал предсказуемо.
Как проверить, находится ли точка внутри сложного многоугольника с самопересечениями?
Для многоугольников с самопересечениями стандартный метод лучей требует корректировки. Часто используют правило «нечётного числа пересечений»: считают все пересечения луча с границей и проверяют их количество. При этом необходимо учитывать ориентацию граней и корректно обрабатывать точки, совпадающие с вершинами. Также применяют алгоритмы с предварительной разбивкой на простые многоугольники или использование векторного произведения для каждой грани, чтобы определить относительное положение точки.
Можно ли ускорить проверку для большого количества точек на одной фигуре?
Да, если нужно проверить множество точек, применяют оптимизации. Например, сначала строят минимальную ограничивающую прямоугольную область (bounding box) или сетку, чтобы быстро отсеять точки, точно находящиеся снаружи. Затем алгоритм проверяет только оставшиеся точки. Для регулярных фигур можно использовать математические условия, которые сводят вычисления к простым арифметическим проверкам. Это значительно сокращает время вычислений при проверке тысяч и миллионов точек.
Какими методами можно определить, находится ли точка внутри произвольного многоугольника на плоскости?
Существует несколько подходов для проверки, принадлежит ли точка области, ограниченной многоугольником. Один из наиболее распространённых — метод лучей: из точки проводится луч в любом направлении, и подсчитывается количество пересечений с границами многоугольника. Если число пересечений нечётное, точка находится внутри; если чётное — снаружи. Другой способ — использование формул с ориентированными углами или векторным произведением: для каждой стороны вычисляется, с какой стороны находится точка, и на основе этого делается вывод. Выбор метода зависит от формы области и требований к точности.
Как изменится проверка принадлежности точки области, если граница задана кривой вместо прямых сегментов?
Когда граница области задаётся кривыми, стандартные методы для многоугольников требуют адаптации. Метод лучей остаётся применимым, но пересечение луча с кривыми вычисляется с помощью соответствующих уравнений кривой, что может потребовать численных методов. Другой вариант — использовать разбиение области на маленькие сегменты, аппроксимируя кривые прямыми, и применять проверку для многоугольников. Для сложных кривых часто используют методы аналитической геометрии или специализированные алгоритмы для криволинейных областей, учитывающие форму и топологию границы.