Содержание статьи

Kernel driver – это программный модуль, который выполняется в пространстве ядра операционной системы и обеспечивает прямое взаимодействие с оборудованием. В отличие от пользовательских драйверов, он имеет полный доступ к памяти и процессорным ресурсам, что позволяет реализовать обработку прерываний, управление устройствами и работу с низкоуровневыми протоколами.
Основная задача Kernel driver – передача команд от ОС к устройствам и обратно, минимизируя задержки. Например, драйвер диска обрабатывает команды чтения и записи блоками по 512 байт или 4 КБ, напрямую управляя контроллером. Драйвер сетевой карты может управлять буферизацией пакетов и запуском DMA-передач без участия пользовательского пространства.
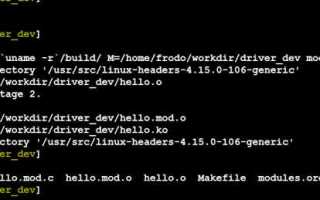
Разработка Kernel driver требует знания архитектуры конкретной ОС и оборудования. В Linux для этого используются функции ядра, такие как register_chrdev для символьных устройств и request_irq для привязки обработчиков прерываний. В Windows применяются модели WDM или KMDF с методами DriverEntry и IoCreateDevice. Неправильная реализация может привести к падению системы или повреждению данных.
При работе с Kernel driver важно учитывать безопасность и права доступа. Модуль должен обрабатывать ошибки устройств, проверять указатели и размеры буферов. Для диагностики используют трассировку вызовов, логи ядра и символьные устройства для передачи данных в пользовательское пространство без риска нарушения целостности ОС.
Какие задачи решает Kernel driver в операционной системе

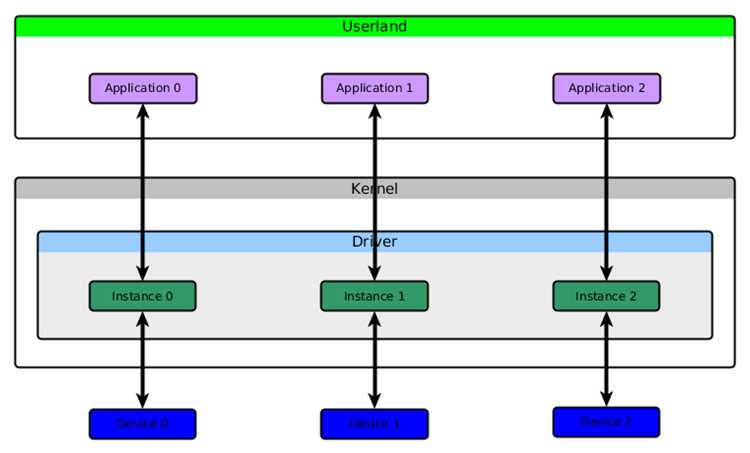
Kernel driver управляет взаимодействием операционной системы с аппаратными устройствами, обеспечивая прямой доступ к контроллерам памяти, сетевых интерфейсов, дисков и периферийных устройств. Он выполняет передачу команд от ядра к оборудованию и сбор статуса работы устройства.
Драйвер обрабатывает аппаратные прерывания, реагируя на события, такие как завершение передачи данных или ошибка устройства. Например, сетевой драйвер при поступлении пакета инициирует копирование данных в буфер ядра, а драйвер контроллера SATA управляет очередью чтения и записи блоков для предотвращения коллизий и потери данных.
Он обеспечивает трансляцию между высокоуровневыми API ОС и низкоуровневыми протоколами оборудования, контролируя корректность команд, состояние устройств и обработку ошибок. Это позволяет поддерживать многозадачность и синхронизацию процессов без вмешательства пользователя.
Kernel driver управляет памятью для буферов и настройкой DMA-передач, минимизируя загрузку процессора. В Linux для этого используются структуры struct request_queue и struct bio, в Windows – объекты IRP и MDL. Контроль ресурсов снижает риск конфликта устройств и обеспечивает стабильную работу системы.
Различие между Kernel и User драйверами
Kernel драйвер работает в пространстве ядра, имеет прямой доступ к памяти, процессору и аппаратуре. Он может обрабатывать прерывания, управлять DMA-передачами и изменять состояние оборудования без посредников. Любая ошибка в коде драйвера ядра может привести к падению всей системы.
User драйвер работает в пользовательском пространстве и взаимодействует с оборудованием через системные вызовы или промежуточные Kernel драйверы. Он не имеет прямого доступа к памяти ядра, поэтому ошибки ограничены рамками процесса, что снижает риск критических сбоев, но увеличивает задержки при передаче данных.
Kernel драйвер оптимизирован для работы с низкоуровневыми интерфейсами и обеспечивает минимальные задержки, необходимый контроль состояния устройств и обработку высокочастотных событий. User драйвер подходит для менее критичных задач, где важна стабильность и возможность отладки без воздействия на ядро.
Для разработки рекомендуется использовать Kernel драйвер, если требуется управление аппаратурой на уровне прерываний и DMA. Для задач мониторинга, пользовательских утилит и обработки данных с уже работающего устройства достаточно User драйвера, который взаимодействует с Kernel драйвером через API и системные интерфейсы.
Как драйвер взаимодействует с оборудованием
Обработка прерываний позволяет драйверу реагировать на события без постоянного опроса устройства. Например, сетевой драйвер получает сигнал о новом пакете, запускает обработчик, копирует данные в буфер ядра и уведомляет сетевой стек. Дисковые драйверы используют прерывания для завершения чтения и записи блоков, минимизируя задержки.
Для передачи больших объемов данных драйвер применяет DMA, позволяя устройству записывать данные напрямую в память, минуя процессор. Контроль доступа осуществляется через таблицы страниц и буферы ядра. В Windows для этого используются структуры MDL и IRP, а в Linux – struct dma_buf и struct scatterlist.
Драйвер также реализует проверку корректности команд и состояния устройства, управляет очередями запросов и освобождает ресурсы после завершения операций. Это снижает риск повреждения данных и обеспечивает стабильное взаимодействие оборудования с ядром.
Структура и компоненты Kernel driver
Kernel driver состоит из нескольких ключевых компонентов: точек входа, обработчиков запросов, структур данных для управления устройством и механизмов взаимодействия с ядром. Точка входа, например DriverEntry в Windows или init_module в Linux, инициализирует драйвер, регистрирует устройства и выделяет необходимые ресурсы.
Обработчики запросов принимают команды от ядра или пользовательских приложений. В Linux это функции read, write, ioctl, в Windows – методы обработки IRP (IRP_MJ_READ, IRP_MJ_WRITE). Они контролируют передачу данных и проверяют корректность запросов.
Структуры данных включают очереди команд, буферы для DMA и внутренние таблицы состояния устройства. В Linux используются struct request_queue и struct device, в Windows – DEVICE_EXTENSION и объекты MDL. Эти элементы позволяют драйверу управлять параллельными запросами и контролировать состояние оборудования.
Компоненты взаимодействия с ядром включают регистрацию обработчиков прерываний, синхронизацию потоков через мьютексы и семафоры, а также управление памятью. Они обеспечивают безопасную работу драйвера в пространстве ядра и предотвращают конфликты между устройствами и процессами.
Регистрация и вызов функций драйвера в ядре
Для работы с ядром драйвер регистрирует свои функции в соответствующих подсистемах ОС. В Linux это делается через структуры file_operations для символьных устройств и pci_driver для PCI-устройств. Каждое поле структуры указывает на функцию обработки операций чтения, записи или управления устройством.
В Windows регистрация выполняется через вызов IoCreateDevice для создания объекта устройства и IoCreateSymbolicLink для создания символьной ссылки. Методы обработки IRP, такие как IRP_MJ_READ и IRP_MJ_WRITE, связываются с соответствующими функциям драйвера через таблицу MajorFunction.
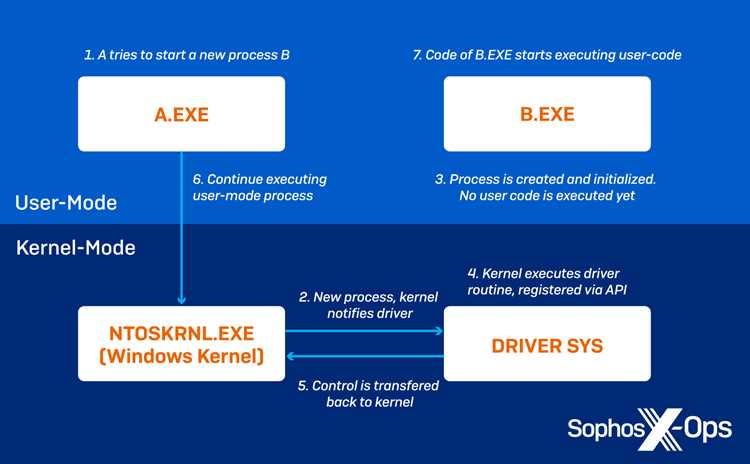
После регистрации ядро вызывает функции драйвера при соответствующих событиях: поступлении команд, прерываниях или запросах из пользовательского пространства. Например, при поступлении пакета сетевой стек инициирует вызов обработчика драйвера, который копирует данные в буфер ядра и уведомляет стек о готовности данных.
Правильная регистрация функций требует проверки возвращаемых кодов ошибок и инициализации всех ресурсов перед вызовом. В Linux рекомендуется проверять результат register_chrdev и корректно освобождать ресурсы при ошибках, в Windows – отслеживать успешность IoCreateDevice и IoCreateSymbolicLink, чтобы предотвратить конфликты устройств.
Обработка прерываний и событий в Kernel driver
Прерывания позволяют устройствам уведомлять ядро о завершении операций без постоянного опроса. Драйвер регистрирует обработчик прерывания, который выполняется сразу после сигнала устройства. В Linux для этого используется request_irq, в Windows – IoConnectInterrupt.
Обработчик прерывания должен выполнять минимальные действия: считывать состояние устройства, очищать флаги прерывания и помещать задачи на обработку в очередь или планировщик. Это предотвращает длительное блокирование ядра и снижает риск потери событий.
Для упорядочивания и передачи данных от обработчика в основной поток драйвера применяются структуры буферов и очередей. В Linux используют tasklet или workqueue, в Windows – DPC (Deferred Procedure Call).
Типы событий и способы их обработки можно представить в таблице:
| Тип события | Пример устройства | Метод обработки |
|---|---|---|
| Прерывание о завершении передачи | Сетевой адаптер | Копирование пакета в буфер ядра, уведомление стека протоколов |
| Ошибка устройства | Дисковый контроллер | Считывание регистра ошибок, запись в лог, постановка задачи на повтор операции |
| Сигнал от периферии | USB-устройство | Обработка команды через очередь событий, обновление состояния устройства |
Корректная организация прерываний и событий снижает нагрузку на CPU, предотвращает потерю данных и обеспечивает своевременную реакцию драйвера на изменения состояния устройства.
Методы отладки и диагностики Kernel драйверов
Отладка Kernel драйверов требует работы с ограниченными средствами ядра, так как ошибки могут приводить к падению системы. Основные методы диагностики включают:
- Логирование: использование функций printk в Linux и DbgPrint в Windows для записи сообщений о состоянии драйвера и устройства.
- Трассировка: отслеживание вызовов функций и обработчиков прерываний с помощью системных инструментов, например, ftrace в Linux или WPP-трейсинга в Windows.
- Символьные устройства: предоставление интерфейса для передачи данных в пользовательское пространство для анализа работы драйвера без остановки системы.
- Инструменты профилирования: измерение времени выполнения функций драйвера и использования ресурсов через perf в Linux или Windows Performance Toolkit.
- Снифферы и эмуляторы устройств: моделирование поведения оборудования для тестирования драйвера без риска повреждения реального устройства.
Рекомендации при отладке:
- Всегда проверять возвращаемые коды функций ядра и корректность указателей.
- Минимизировать действия в обработчиках прерываний, перенаправляя тяжелые задачи в очереди или tasklet/worker.
- Использовать условное логирование и фильтры, чтобы не перегружать журнал сообщений ядра.
- Тестировать драйвер на виртуальных машинах или эмуляторах перед установкой на реальном оборудовании.
Безопасность и права доступа для Kernel driver
Kernel драйвер работает в пространстве ядра, поэтому ошибки или уязвимости могут привести к падению системы или компрометации данных. Контроль безопасности включает ограничение прав доступа, проверку параметров и управление ресурсами.
Основные меры защиты:
- Проверка пользовательских данных: все входные параметры из пользовательского пространства должны проверяться на корректность и диапазон значений.
- Ограничение прав доступа: создание объектов устройства с точной маской прав, позволяющей доступ только доверенным процессам.
- Изоляция памяти: использование механизмов ядра для защиты буферов и DMA-адресов от постороннего доступа.
- Синхронизация доступа: применение мьютексов, спинлоков и семафоров для предотвращения гонок и повреждения данных.
- Регистрация и аудит: ведение журналов критических операций и ошибок для последующего анализа.
Рекомендации по реализации безопасности:
- Не использовать пользовательские указатели напрямую в ядре, применять функции копирования (copy_from_user, MmCopyFromUser).
- Инициализировать все структуры и переменные перед использованием.
- Минимизировать код в обработчиках прерываний и критических секциях.
- Регулярно обновлять драйвер и контролировать совместимость с ядром ОС.
Вопрос-ответ:
Чем Kernel драйвер отличается от драйвера в пользовательском пространстве?
Kernel драйвер работает в пространстве ядра и имеет прямой доступ к аппаратуре и памяти системы, что позволяет обрабатывать прерывания, управлять DMA-передачами и выполнять операции без задержек на переключение контекста. Драйверы в пользовательском пространстве используют системные вызовы для взаимодействия с оборудованием через ядро, поэтому они не могут напрямую управлять устройствами и их ошибки ограничены рамками процесса, не вызывая краха всей системы.
Как Kernel драйвер получает и обрабатывает прерывания от устройства?
Прерывания позволяют устройству уведомлять драйвер о завершении операции или изменении состояния. Драйвер регистрирует обработчик прерывания через системные функции ядра, например, request_irq в Linux или IoConnectInterrupt в Windows. Обработчик быстро считывает состояние устройства, очищает флаги прерывания и ставит задачи на дальнейшую обработку в очереди или планировщик, чтобы не блокировать ядро и не потерять события.
Какие структуры данных чаще всего используются в Kernel драйверах для управления устройствами?
Для управления устройствами драйвер использует структуры, отражающие состояние оборудования и очереди команд. В Linux это struct device, struct request_queue и struct bio, которые позволяют организовать обработку чтения и записи блоков, синхронизацию и управление буферами. В Windows применяются DEVICE_EXTENSION, MDL и IRP для хранения данных о состоянии устройства, выделения памяти и управления запросами от ядра и пользовательских приложений.
Какие методы диагностики и отладки Kernel драйверов существуют?
Для диагностики используются логирование, трассировка и тестирование на эмуляторах. В Linux популярно printk для сообщений ядра и ftrace для отслеживания вызовов функций. В Windows применяют DbgPrint и WPP-трейсинг. Для анализа поведения драйвера можно использовать символьные устройства, через которые данные передаются в пользовательское пространство, а также инструменты профилирования CPU и памяти для измерения времени выполнения критических функций и контроля ресурсов.
Какие меры безопасности необходимо соблюдать при разработке Kernel драйвера?
Драйвер должен проверять все данные из пользовательского пространства и ограничивать права доступа к устройствам. Входные указатели должны обрабатываться через функции ядра, например copy_from_user в Linux или MmCopyFromUser в Windows, чтобы исключить прямой доступ к памяти ядра. Также важно использовать синхронизацию через мьютексы и спинлоки, управлять буферами DMA и освобождать ресурсы при ошибках. Дополнительно рекомендуется вести журнал критических операций и тестировать драйвер в виртуальных средах перед установкой на реальное оборудование.
Как Kernel драйвер управляет памятью для работы с устройствами?
Kernel драйвер выделяет и освобождает память для буферов, используемых устройством и ядром. Для прямого доступа устройства к памяти применяются механизмы DMA, которые позволяют записывать данные напрямую без участия CPU. В Linux используются структуры struct dma_buf и struct scatterlist, а в Windows — объекты MDL для управления страницами памяти. Драйвер также контролирует доступ к этим буферам, чтобы исключить перезапись данных и утечки в пользовательское пространство. При реализации важно проверять размеры буферов и корректность адресов, чтобы избежать повреждения данных и конфликтов между процессами и устройствами.