Содержание статьи

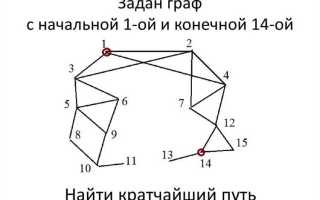
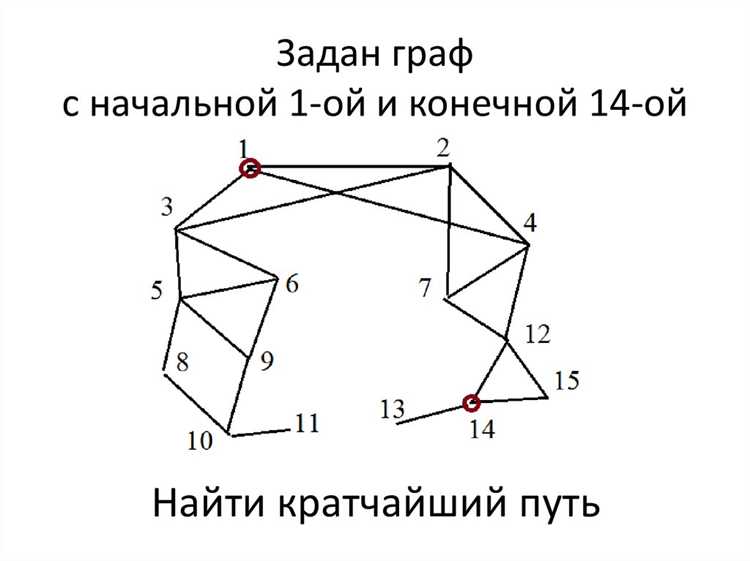
В задачах маршрутизации и анализа сетей часто требуется найти путь с минимальной суммой весов между двумя вершинами. Для графов с положительными весами подходит алгоритм Дейкстры, который обрабатывает до 105 вершин с временем работы O(V²) или O(E log V) при использовании очереди с приоритетом.
Если граф содержит отрицательные веса, алгоритм Беллмана-Форда позволяет вычислить кратчайший путь, выявляя циклы отрицательного веса. Для графов с ограниченным количеством вершин до 500 применим алгоритм Флойда-Уоршелла, который строит матрицу кратчайших расстояний между всеми парами вершин с временной сложностью O(V³).
Для невзвешенных графов или задач, где важна минимальная длина пути по числу ребер, подойдет поиск в ширину (BFS). Он гарантирует нахождение пути с минимальным количеством переходов и использует память пропорционально количеству вершин и ребер.
Выбор алгоритма зависит от структуры графа, диапазона весов и объема данных. Корректная реализация включает проверку циклов, контроль переполнений и хранение информации о предшественниках для восстановления полного маршрута. Практическое применение охватывает транспортные системы, компьютерные сети и планирование маршрутов роботов.
Выбор структуры данных для представления графа
Для хранения графа чаще всего используют матрицу смежности или список смежности. Матрица смежности представляет граф в виде V×V массива, где V – количество вершин, а элемент [i][j] хранит вес ребра от вершины i к вершине j. Этот подход удобен для плотных графов, где количество ребер близко к V², и обеспечивает быстрый доступ O(1) к любому ребру.
Список смежности хранит для каждой вершины массив соседних вершин с соответствующими весами. Он экономит память для разреженных графов, где количество ребер E значительно меньше V². Временная сложность обхода всех смежных вершин – O(E), что оптимально для алгоритмов Дейкстры и Беллмана-Форда.
При реализации на языках с динамическими структурами данных, таких как Python или JavaScript, список смежности удобно хранить в виде словарей или массивов объектов. Для алгоритмов, требующих частого обновления весов ребер, матрица смежности обеспечивает более быстрый доступ и модификацию значений.
Выбор структуры данных должен учитывать плотность графа, размерность и требования алгоритма. Для плотных графов до 500 вершин матрица смежности обеспечивает простоту кода и прямой доступ к ребрам, а для больших разреженных графов с миллионами вершин предпочтительнее список смежности для экономии памяти и ускорения итерации по смежным вершинам.
Применение алгоритма Дейкстры для ориентированных графов
Алгоритм Дейкстры вычисляет кратчайший путь от одной вершины к остальным в ориентированном графе с неотрицательными весами. Для графа с V вершинами и E ребрами стандартная реализация через массив имеет сложность O(V²), а с использованием очереди с приоритетом – O(E log V).
Для реализации выбирают список смежности, где каждая вершина хранит массив соседних вершин и веса ребер. Начальная вершина получает расстояние 0, остальные – бесконечность. Алгоритм поочередно выбирает вершину с минимальным текущим расстоянием, обновляет расстояния до соседей и фиксирует посещенные вершины.
При ориентированных графах важно учитывать направление ребер: обновление расстояния происходит только от исходной вершины к соседям. Для больших графов рекомендуется использовать двоичную кучу или фибоначчиеву кучу для ускорения извлечения вершины с минимальным расстоянием.
Для восстановления полного маршрута хранят предшественников каждой вершины. После завершения алгоритма путь к целевой вершине строится, проходя от конечной вершины к начальной через массив предков. Это позволяет точно определить последовательность ребер минимальной длины.
Использование алгоритма Беллмана-Форда при отрицательных весах
Алгоритм Беллмана-Форда применяется для графов с отрицательными весами, когда алгоритм Дейкстры неприменим. Он вычисляет кратчайшее расстояние от одной вершины ко всем остальным за O(V·E), где V – количество вершин, E – количество ребер.
Основная идея заключается в последовательном «расслаблении» всех ребер V−1 раз. Если после этого можно уменьшить расстояние по какому-либо ребру, граф содержит цикл с отрицательным весом.
Для наглядного отслеживания изменений расстояний удобно использовать таблицу:
| Итерация | Вершина | Текущее расстояние | Предшественник |
|---|---|---|---|
| 0 | A | 0 | — |
| 1 | B | 3 | A |
| 1 | C | 7 | B |
| 2 | C | 5 | A |
Реализация начинается с установки расстояний всех вершин в бесконечность, кроме стартовой. Каждое ребро проверяется и обновляет расстояние и предшественника, если найден более короткий путь. После завершения итераций проверяют наличие отрицательных циклов.
Для больших графов важно хранить ребра в списке, а не в матрице смежности, чтобы экономить память и ускорить проход по E ребрам на каждой итерации.
Применение алгоритма Флойда-Уоршелла для всех пар вершин
Алгоритм Флойда-Уоршелла вычисляет кратчайшие пути между всеми парами вершин в графе с весами, включая отрицательные, но без циклов отрицательного веса. Временная сложность алгоритма O(V³), где V – количество вершин.
Основные этапы реализации:
- Создать матрицу расстояний D размером V×V, где D[i][j] = вес ребра i→j или бесконечность, если ребра нет. Для диагонали D[i][i] = 0.
- Создать матрицу предшественников P для восстановления маршрутов. Изначально P[i][j] = i при наличии ребра, иначе P[i][j] = null.
- Для каждой вершины k поочередно проверять все пары вершин (i, j) и обновлять расстояние:
- Если D[i][k] + D[k][j] < D[i][j], присвоить D[i][j] = D[i][k] + D[k][j] и P[i][j] = P[k][j].
- После завершения всех итераций матрица D содержит кратчайшие расстояния, а P – информацию для восстановления полного пути.
Рекомендации по применению:
- Использовать матрицу смежности для хранения графа, так как алгоритм требует частого доступа к любому ребру.
- Для графов с более чем 500 вершин оценивать объем памяти: матрица D и P занимают O(V²) памяти.
- При отрицательных циклах проверять диагональ матрицы D: если D[i][i] < 0, путь не может быть корректно определен.
Реализация поиска в ширину для невзвешенных графов
Поиск в ширину (BFS) используется для нахождения кратчайшего пути по числу ребер в невзвешенных графах. Алгоритм гарантирует минимальное количество переходов между вершинами. Временная сложность O(V + E), где V – число вершин, E – число ребер.
Для реализации применяют очередь и массив для хранения расстояний:
- Инициализировать массив расстояний D, присвоив начальной вершине 0, остальным – бесконечность.
- Поместить стартовую вершину в очередь Q.
- Пока Q не пуста, извлекать вершину u, проходить по всем соседям v и проверять: если D[v] = бесконечность, присвоить D[v] = D[u] + 1 и добавить v в Q.
Для восстановления полного пути используют массив предшественников P, где P[v] = u при обновлении расстояния. После завершения BFS путь к целевой вершине строится, проходя по массиву P от конечной вершины к начальной.
Рекомендации:
- Список смежности экономит память и ускоряет обход смежных вершин.
- Для графов с миллионами вершин и ребер использовать очередь с динамическим размером для предотвращения переполнения.
- Для проверки корректности алгоритма создают тестовые графы с известными кратчайшими путями, чтобы убедиться в правильности обновления массива предшественников.
Сравнение временной сложности разных алгоритмов поиска пути
Алгоритмы поиска кратчайшего пути различаются по времени выполнения в зависимости от структуры графа и типа весов ребер. Для ориентированных графов с неотрицательными весами алгоритм Дейкстры на матрице смежности имеет сложность O(V²), а с использованием очереди с приоритетом – O(E log V).
Алгоритм Беллмана-Форда применим к графам с отрицательными весами. Его сложность O(V·E), что делает его менее подходящим для плотных графов с большим количеством ребер, но необходимым для выявления циклов отрицательного веса.
Алгоритм Флойда-Уоршелла вычисляет кратчайшие пути для всех пар вершин и требует O(V³) операций. Этот метод удобен для графов с небольшим количеством вершин (до 500), где важно иметь матрицу расстояний между всеми вершинами.
Для невзвешенных графов поиск в ширину (BFS) гарантирует минимальное количество переходов и выполняется за O(V + E). Этот подход предпочтителен для разреженных графов и больших сетей, где важно быстро определить путь по числу ребер.
Выбор алгоритма следует делать исходя из количества вершин и ребер, диапазона весов и задачи: оптимизация по времени для больших графов или точность для графов с отрицательными циклами.
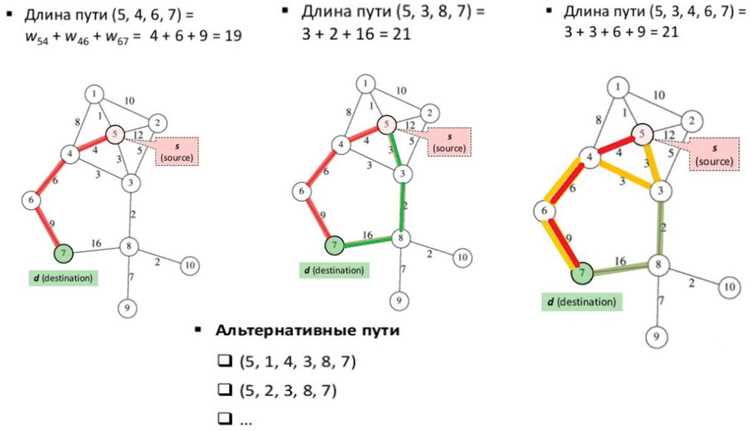
Выбор кратчайшего пути при наличии нескольких маршрутов
Когда граф содержит несколько путей между вершинами с одинаковой суммой весов или длиной, важно определить, какой маршрут выбрать для практических целей. Алгоритмы поиска пути могут дать несколько эквивалентных вариантов.
Рекомендации по выбору пути:
- Использовать массив предшественников, чтобы восстановить все возможные маршруты с минимальной длиной.
- В случаях одинаковой длины учитывать дополнительные критерии:
- минимальное количество поворотов или переходов между вершинами;
- минимальное суммарное время при варьирующихся весах ребер;
- предпочтения по конкретным вершинам или зонам графа.
- Для больших графов применять обход в глубину или модифицированный BFS для поиска всех кратчайших маршрутов без повторного посещения вершин.
- При интеграции с внешними системами хранить несколько маршрутов в структуре данных, позволяющей быстро выбирать альтернативу при изменении весов ребер.
Таким образом, выбор кратчайшего пути не ограничивается одной метрикой. Дополнительные параметры и хранение всех равнозначных вариантов повышают точность маршрутизации и позволяют адаптироваться к динамическим условиям графа.
Отладка и проверка корректности найденного пути

После вычисления кратчайшего пути важно убедиться в корректности результатов. Основная проверка заключается в сравнении суммарного веса выбранного маршрута с известными или ожидаемыми значениями для тестовых графов.
Рекомендации по проверке:
- Проверять, что каждый шаг пути соответствует существующему ребру графа и направление ребра соблюдается для ориентированных графов.
- Сравнивать рассчитанное расстояние с суммой весов всех ребер на пути; расхождения могут указывать на ошибку в обновлении массива предшественников или расстояний.
- Для алгоритмов с возможными отрицательными циклами (Беллмана-Форда) проверять, что ни одна вершина не участвует в цикле, где расстояние можно уменьшить бесконечно.
- Использовать графическое представление или логирование последовательности вершин для визуального контроля маршрута и выявления пропусков или повторов.
- Создавать тестовые случаи с заранее известными кратчайшими путями для проверки всех алгоритмов – Дейкстры, BFS, Флойда-Уоршелла.
- Автоматизировать проверки через скрипты, которые пересчитывают суммарный вес и сравнивают его с массивом расстояний, чтобы обнаруживать ошибки в больших графах.
Комплексная проверка включает проверку структуры графа, точности вычислений и корректности восстановления маршрута, что гарантирует надежность алгоритмов поиска кратчайшего пути.
Вопрос-ответ:
Какие алгоритмы подходят для поиска кратчайшего пути в графе с отрицательными весами ребер?
Для графов с отрицательными весами используют алгоритм Беллмана-Форда. Он последовательно проверяет все ребра V−1 раз (где V — число вершин) и позволяет выявлять циклы с отрицательной суммой весов. Алгоритм строит массив расстояний и массив предшественников, что позволяет восстанавливать полный путь от стартовой вершины к любой другой.
Когда стоит применять алгоритм Флойда-Уоршелла вместо Дейкстры?
Алгоритм Флойда-Уоршелла применяется, если нужно узнать кратчайшие пути между всеми парами вершин. Он создает матрицу расстояний и матрицу предшественников и выполняет три вложенных цикла для обновления расстояний. Для больших графов с тысячами вершин такой подход потребляет много памяти и времени, поэтому его используют преимущественно для графов до 500 вершин.
Как восстановить путь после вычисления кратчайшего расстояния в графе?
После вычисления кратчайших расстояний используют массив предшественников, где для каждой вершины хранится предыдущая вершина на кратчайшем пути. Начав с конечной вершины, переходят к предшественнику, пока не достигнут старт. Полученная последовательность вершин формирует маршрут с минимальной суммой весов или минимальным количеством ребер.
Как проверить правильность найденного кратчайшего пути?
Для проверки пути необходимо убедиться, что все шаги соответствуют существующим ребрам и их направлениям. Сумма весов выбранного маршрута должна совпадать с вычисленным расстоянием. Для алгоритмов с отрицательными весами проверяют отсутствие циклов, где расстояние уменьшается бесконечно. В больших графах рекомендуется использовать тестовые случаи с известными кратчайшими маршрутами и логирование последовательности вершин.