Blender предоставляет несколько типов физических симуляций, которые можно применить к объектам и целым сценам. Для начала необходимо выбрать объект и в панели Physics Properties назначить подходящий тип: Rigid Body для твердых тел, Soft Body для гибких объектов или Fluid для жидкостей.
При работе с твердыми телами важно корректно настроить коллайдеры, массу и коэффициенты трения. Эти параметры влияют на точность столкновений и реалистичность движения объектов в сцене. Для мягких тел требуется задать упругость, плотность и damping, чтобы симуляция соответствовала реальным материалам.
Гравитация и глобальные силы сцены определяются в настройках World или Scene. Установка силы тяжести, ветра или силы магнитного притяжения позволяет управлять поведением объектов без необходимости вручную анимировать каждое движение. Это особенно полезно при создании сложных сцен с множеством взаимодействующих объектов.
После активации физики необходимо протестировать симуляцию, используя Play или Bake в панели Scene. Это позволяет выявить ошибки столкновений и скорректировать параметры до финального рендеринга или экспорта сцены для игр и анимаций.
Выбор объекта для применения физических свойств
Для корректной симуляции физики в Blender необходимо сначала определить, какой объект будет участвовать в динамике сцены. Выбираются отдельные элементы в Outliner или прямо в 3D-виде, используя инструмент Select. Объект должен иметь геометрию, которая подходит для выбранного типа физики: твердые тела требуют замкнутого меша без пересечений, мягкие тела – сетку с достаточным количеством вершин для деформации.
Если объект состоит из нескольких частей, рекомендуется объединить их через Ctrl+J для единого физического взаимодействия. Для объектов с большим количеством мелких деталей удобнее использовать Rigid Body с настройкой Collision Shape на Compound, чтобы ускорить симуляцию.
Объекты, которые должны оставаться статичными, следует отмечать как Passive в настройках физики. Это предотвращает их непреднамеренное смещение при взаимодействии с активными объектами, сохраняя точность всей сцены. Корректный выбор и подготовка объектов значительно упрощает последующую настройку симуляции и снижает риск ошибок при столкновениях.
Настройка типа физики: твердые тела, мягкие тела, жидкость
В Blender каждый объект может использовать один из основных типов физики: Rigid Body, Soft Body или Fluid. Rigid Body применяют к твердым объектам, которые не деформируются. В настройках указывают массу, тип коллайдера и параметры столкновений. Для сложных форм используют Collision Shape: Mesh, а для простых геометрий – Box, Sphere или Cylinder.
Soft Body подходит для гибких объектов, тканевых элементов и резины. Настройки включают упругость, damping, пружинные соединения и точность симуляции. Чем выше детализация сетки объекта, тем точнее будет деформация, но увеличивается нагрузка на симуляцию.
Fluid позволяет моделировать жидкости и газы. Для каждого объекта выбирают тип Flow или Obstacle. В настройках указывают плотность, вязкость и разрешение сетки симуляции. Точные параметры ускоряют расчеты и обеспечивают реалистичное взаимодействие жидкости с другими объектами сцены.
Активация столкновений и определение коллайдеров

Для корректного взаимодействия объектов в сцене необходимо включить столкновения в панели Physics Properties. Устанавливается тип коллайдера через Collision Shape, который определяет форму, учитываемую симуляцией. Для простых объектов подходят Box, Sphere или Cylinder, для сложных – Mesh или Compound.
Параметры коллайдера включают Margin, задающий минимальное расстояние между объектами для предотвращения прохождения сквозь друг друга, и Friction, влияющий на трение при контакте. Для мягких тел и жидкостей активируют соответствующие опции Collision, чтобы объекты реагировали на давление и деформацию.
Для ускорения симуляции рекомендуется использовать упрощенные формы коллайдеров на сложных объектах, оставляя детализированную геометрию только там, где важна точность столкновений. Это позволяет поддерживать реалистичное поведение сцены без чрезмерной нагрузки на вычисления.
Установка массы, трения и других физических параметров

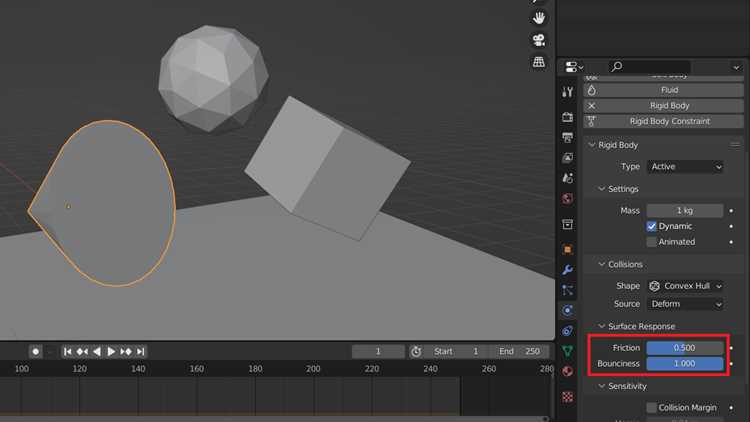
Масса объекта задается в разделе Rigid Body или Soft Body и напрямую влияет на скорость движения и взаимодействие с другими объектами. Для твердых тел масса обычно измеряется в килограммах и должна соответствовать реальному масштабу сцены. Слишком малая масса приводит к нереалистичному поведению при столкновениях, слишком большая – замедляет движение.
Трение регулируется параметром Friction и определяет сопротивление скольжению при контакте. Для скользких поверхностей устанавливают значения от 0 до 0.2, для шероховатых – 0.5 и выше. Параметр Bounciness контролирует упругость отскока, важен при моделировании резиновых или упругих объектов.
Дополнительно на точность симуляции влияют параметры Damping, уменьшающий скорость вращения и движения, и Collision Margin, определяющий минимальное расстояние между объектами при столкновении. Корректная настройка этих значений обеспечивает стабильную и предсказуемую физику сцены.
Применение гравитации и глобальных сил сцены
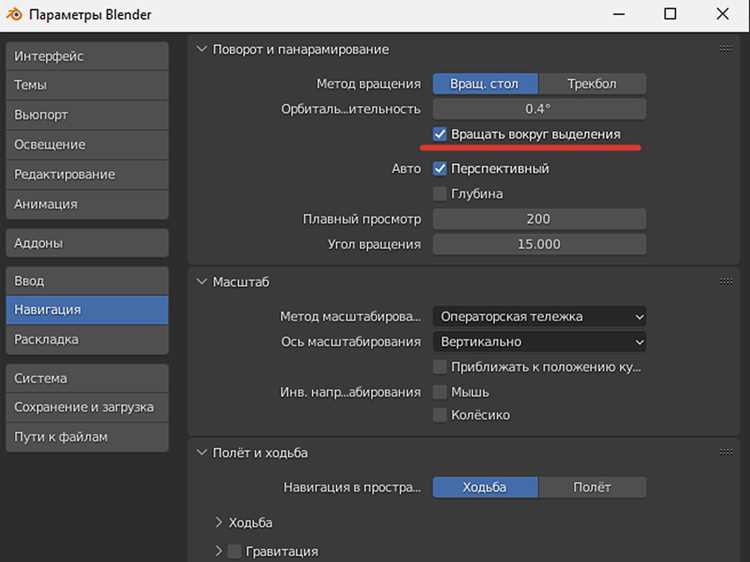
Гравитация задается в панели Scene Properties через параметры Gravity, где указываются направление и сила. Значение по умолчанию – -9.81 м/с² по оси Z, что соответствует земной гравитации. Для нестандартных условий можно изменять величину и ориентацию в пространстве, чтобы моделировать летающие или подводные сцены.
Глобальные силы включают ветер, турбулентность и магнитные поля. Их создают через Force Field и настраивают величину, радиус действия и тип влияния. Например, Wind с силой 5 воздействует на мягкие тела и жидкости, ускоряя движение и деформацию сетки, а Force типа Magnetic позволяет привлекать или отталкивать объекты определенного класса.
Для стабильной симуляции важно проверять взаимодействие глобальных сил с локальными параметрами объектов, такими как масса и трение. Сочетание правильно настроенной гравитации и внешних сил обеспечивает реалистичное движение и контролируемое поведение объектов в сцене.
Использование физики для анимации объектов
Физика в Blender позволяет создавать динамическую анимацию без ручного ключевого кадра. Для этого объекты получают физические свойства, а симуляция рассчитывает их движение в реальном времени. Основные шаги включают:
- Назначение типа физики: Rigid Body, Soft Body или Fluid.
- Настройка массы, трения и упругости для объектов.
- Определение коллайдеров и включение столкновений.
- Применение глобальных сил, таких как гравитация и ветер.
Для контроля анимации используют:
- Bake симуляции – фиксирует движение объектов на заданный диапазон кадров.
- Комбинацию физики с ключевыми кадрами – позволяет смешивать ручную анимацию и динамическое поведение.
- Использование Constraints для ограничения движения объектов по осям или радиусу действия.
Тщательная настройка физических параметров и последовательное тестирование симуляции обеспечивает предсказуемое и плавное движение объектов в анимации.
Проверка симуляции и отладка столкновений
После настройки физики важно протестировать поведение объектов в сцене, чтобы убедиться в корректности столкновений и движений. Для этого используют встроенные инструменты Blender:
- Play в Timeline – позволяет просмотреть симуляцию в реальном времени.
- Bake – фиксирует движения объектов на выбранный диапазон кадров для точного анализа.
- Отображение Collision Bounds – показывает формы коллайдеров и зоны взаимодействия объектов.
Для выявления проблем применяют следующие методы:
- Проверка Collision Margin и корректировка размеров коллайдеров, чтобы объекты не проходили сквозь друг друга.
- Снижение или увеличение массы и трения для объектов, чтобы движения соответствовали реальной физике.
- Использование упрощенных коллайдеров для сложных объектов, чтобы ускорить симуляцию и устранить пересечения.
- Просмотр отдельных кадров и изменение настроек Damping и Bounciness для стабилизации поведения.
Последовательная проверка и корректировка параметров позволяет добиться точного взаимодействия объектов и предотвратить ошибки при финальном рендеринге или экспорте сцены.
Экспорт сцены с физикой для рендеринга или игр
Для передачи сцены с физикой в сторонние движки или сохранения для рендеринга важно правильно подготовить данные и выбрать подходящий формат экспорта. Blender поддерживает несколько форматов, учитывающих физические свойства объектов.
Основные рекомендации:
| Формат | Особенности | Применение |
|---|---|---|
| FBX | Сохраняет анимацию объектов, включая baked физику | Игровые движки, интеграция с Unity и Unreal |
| GLTF/GLB | Поддерживает анимацию и материалы, физика сохраняется через baked движения | Web и мобильные приложения |
| ABC (Alembic) | Фиксирует симуляцию объектов и мягких тел кадр за кадром | Визуальные эффекты и финальный рендер |
Перед экспортом необходимо bake симуляцию, чтобы движения объектов фиксировались во всех кадрах. Для твердых тел используется Rigid Body Bake, для мягких тел – Soft Body Bake, для жидкостей – Fluid Bake. После bake проверяют корректность анимации и сохраняют файл в выбранном формате, обеспечивая сохранение физических взаимодействий при импорте в другие среды.
Вопрос-ответ:
Как включить физику для объекта в Blender?
Чтобы включить физику, выделите объект и перейдите в панель Physics Properties. Выберите тип симуляции: Rigid Body для твердых тел, Soft Body для гибких объектов или Fluid для жидкостей. После выбора настройте массу, трение и другие параметры, соответствующие поведению объекта.
В чем разница между твердыми и мягкими телами в Blender?
Rigid Body предназначен для объектов, которые не деформируются при столкновениях. Они сохраняют форму и рассчитываются по массе и коллайдерам. Soft Body используется для объектов, которые сгибаются или растягиваются, например ткань или резина, и требует настройки упругости, damping и сетки вершин для корректной деформации.
Как настроить столкновения между объектами?
Для столкновений необходимо включить Collision в настройках физики. Укажите Collision Shape — простую форму для ускорения симуляции или Mesh для точного совпадения с геометрией объекта. Дополнительно настройте Margin и Friction для контроля расстояния между объектами и сопротивления при контакте.
Можно ли использовать физику вместе с ключевыми кадрами?
Да, Blender позволяет комбинировать физическую симуляцию с ручной анимацией. Для этого объекту назначают физику и проводят Bake, фиксируя движение. После этого можно добавлять ключевые кадры для отдельных свойств объекта, таких как положение или вращение, чтобы объединить динамическое поведение и анимацию.
Как экспортировать сцену с физикой в игровой движок?
Перед экспортом выполните Bake симуляции для всех объектов с физикой. Затем сохраните сцену в формате FBX или GLTF/GLB. Эти форматы сохраняют анимацию и движение объектов, что позволяет импортировать сцену в Unity или Unreal с сохранением взаимодействия твердых тел, мягких тел и жидкости.
Как определить, какой тип физики подходит для объекта в Blender?
Выбор типа физики зависит от поведения объекта. Для твердых предметов, которые не деформируются при столкновениях, используют Rigid Body. Если объект должен сгибаться, растягиваться или вести себя как ткань, применяют Soft Body. Для моделирования жидкости или газа выбирают Fluid. После назначения типа физики необходимо настроить параметры массы, трения и коллайдера для корректной симуляции.
Что делать, если объекты проходят сквозь друг друга при симуляции?
Сначала проверьте настройки коллайдеров в Physics Properties. Убедитесь, что выбран правильный Collision Shape и корректно установлен Collision Margin. Для сложных форм рекомендуется использовать упрощенные коллайдеры или тип Compound. Также следует проверить массу и трение объектов — слишком малая масса или низкое трение могут приводить к прохождению сквозь другие объекты. После изменений симуляцию нужно пересчитать с помощью Bake.