Содержание статьи

Вектор сам по себе не содержит числового описания, пока не выбран базис. Набор координат – это результат разложения вектора по базисным векторам, а не его «свойство по умолчанию». Один и тот же вектор в разных базисах имеет разные координаты, поэтому при вычислениях всегда требуется явно фиксировать базис и порядок его векторов.
На практике координаты вектора используются при решении систем линейных уравнений, работе с матрицами, анализе движений в пространстве и преобразованиях координат. Например, при задании вектора в стандартном базисе ℝ² или ℝ³ координаты совпадают с его декартовыми компонентами, а при переходе к произвольному базису их необходимо вычислять отдельно, опираясь на линейную комбинацию.
Ключевой вычислительный момент – выбор метода. Для произвольного базиса применяется решение системы уравнений, составленной из базисных векторов. Если базис ортонормированный, координаты удобно находить через скалярные произведения. При смене базиса используется матрица перехода и её обратная, что особенно важно при последовательных преобразованиях.
Чтобы избежать ошибок, рекомендуется после нахождения координат выполнить обратную операцию: восстановить исходный вектор как линейную комбинацию базисных векторов и сравнить результат с исходными данными. Такой приём позволяет сразу выявить неточности в вычислениях и неверно заданный базис.
Как задать базис и записать координатный столбец вектора
Базис векторного пространства задаётся как упорядоченный набор линейно независимых векторов. Для пространства размерности n требуется ровно n векторов. Например, в ℝ³ базис состоит из трёх векторов, ни один из которых не выражается через линейную комбинацию двух остальных. Порядок векторов фиксируется заранее, так как перестановка меняет запись координат.
При аналитическом задании базисные векторы записываются в координатной форме относительно стандартного базиса. Например, базис B = {b₁, b₂} в ℝ² может быть задан как b₁ = (1, 2), b₂ = (−1, 1). Эти данные полностью определяют способ разложения любого вектора пространства.
Чтобы записать координаты вектора v в базисе B, необходимо представить его в виде линейной комбинации v = x₁b₁ + x₂b₂ + … + xₙbₙ. Числа x₁, x₂, …, xₙ и являются координатами вектора в данном базисе. Они зависят только от выбранного базиса и самого вектора.
Координатный столбец вектора записывается в виде вертикального массива чисел: (x₁, x₂, …, xₙ)ᵀ. Такая форма используется при матричных вычислениях, умножении на матрицу перехода и проверке линейных преобразований. Размер столбца всегда совпадает с размерностью пространства.
При практической работе рекомендуется отдельно фиксировать: координаты базисных векторов, порядок их следования и формат записи координатного столбца. Несоблюдение хотя бы одного из этих пунктов приводит к некорректной интерпретации результатов даже при верных числовых вычислениях.
Нахождение координат через решение системы линейных уравнений
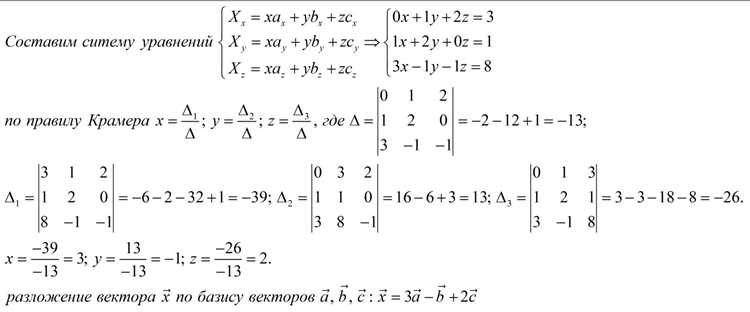
Для вычислений базисные векторы записываются столбцами матрицы A размера n×n, а координаты вектора v – в виде столбца свободных членов. Задача сводится к матричному уравнению A·x = v, где x – искомый координатный столбец вектора в базисе B.
Система решается стандартными методами линейной алгебры: методом Гаусса, через вычисление обратной матрицы A⁻¹ или с использованием определителей при малых размерностях. Если det A ≠ 0, базис корректен и решение существует единственное. Нулевой определитель указывает на линейную зависимость базисных векторов.
Для уменьшения вычислительных ошибок рекомендуется приводить матрицу к ступенчатому виду, а не использовать формулы Крамера при размерности выше 3. При работе с дробными коэффициентами целесообразно сохранять точные значения до финального шага, избегая промежуточных округлений.
После нахождения координат выполняется проверка: подстановка найденных x₁, x₂, …, xₙ в линейную комбинацию базисных векторов должна точно воспроизводить исходный вектор v. Несовпадение указывает на арифметическую ошибку или некорректную запись системы.
Вычисление координат в ортонормированном базисе с помощью скалярного произведения

Ортонормированный базис состоит из взаимно перпендикулярных векторов единичной длины. Это свойство позволяет находить координаты вектора без решения систем уравнений. Если базис B = {e₁, e₂, …, eₙ} ортонормирован, то любой вектор v однозначно раскладывается по этим векторам.
Координата вектора v по направлению базисного вектора eᵢ вычисляется как скалярное произведение: xᵢ = (v, eᵢ). Длина eᵢ равна 1, а попарная ортогональность исключает вклад остальных направлений, поэтому формула не требует деления или дополнительной нормировки.
Для практических вычислений в ℝ² и ℝ³ скалярное произведение удобно считать через координаты: (v, eᵢ) = v₁eᵢ₁ + v₂eᵢ₂ + … + vₙeᵢₙ. Полученные значения сразу образуют координатный столбец вектора в данном базисе.
| Элемент | Содержание вычисления |
|---|---|
| Вектор v | Задан в стандартном базисе координат |
| Базис eᵢ | Ортогональные векторы единичной длины |
| Координата xᵢ | Результат скалярного произведения (v, eᵢ) |
Перед применением формулы необходимо проверить нормированность базисных векторов. Если длина хотя бы одного eᵢ отлична от 1, координаты будут искажены. В таком случае базис требуется предварительно нормировать или использовать общий метод через систему линейных уравнений.
Переход между базисами через матрицу перехода и обратную матрицу
Переход между базисами применяется, когда координаты вектора известны в одном базисе, но требуется получить их в другом. Пусть заданы два базиса одного пространства: B = {b₁, b₂, …, bₙ} и C = {c₁, c₂, …, cₙ}. Все вычисления выполняются при условии, что оба базиса линейно независимы и заданы в одном координатном пространстве.
Матрица перехода от базиса B к базису C составляется из координат векторов базиса B, выраженных через базис C. Каждый столбец такой матрицы содержит координаты соответствующего bᵢ в базисе C. Эта матрица полностью описывает связь между координатными столбцами.
Если координатный столбец вектора v в базисе B обозначен как [v]ᴮ, то координаты в базисе C вычисляются по формуле [v]ᶜ = P·[v]ᴮ, где P – матрица перехода от B к C. Размерность матрицы всегда равна n×n.
Обратный переход выполняется с помощью обратной матрицы P⁻¹. Если требуется восстановить координаты в базисе B по известным координатам в базисе C, используется выражение [v]ᴮ = P⁻¹·[v]ᶜ. Существование обратной матрицы гарантируется линейной независимостью базисных векторов.
Для надёжных вычислений рекомендуется явно проверять, какой именно переход реализует матрица: от старого базиса к новому или наоборот. Перепутанное направление перехода – частая причина ошибок, приводящая к корректным по форме, но неверным по смыслу результатам.
Определение координат по геометрическим компонентам в 2D и 3D
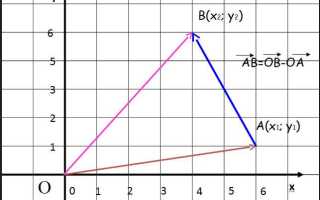
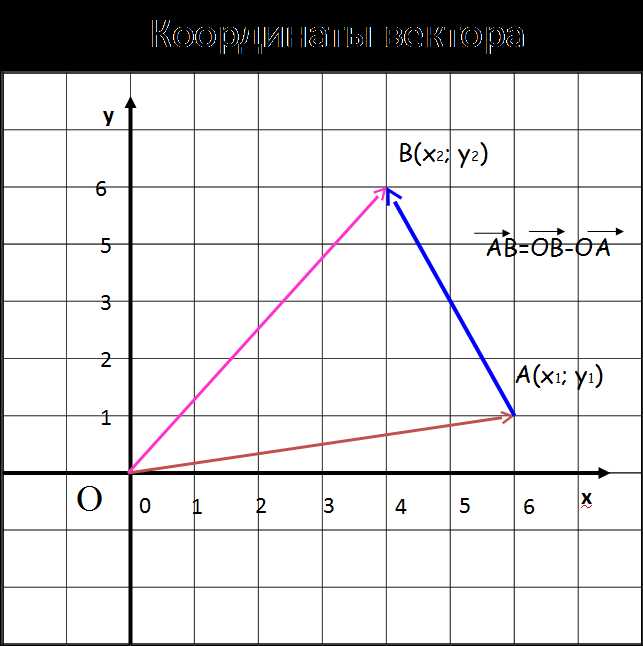
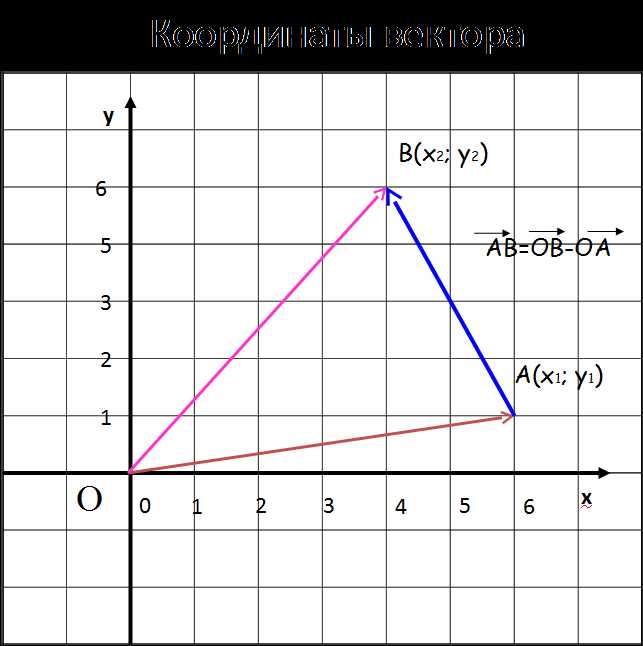
В двумерном и трёхмерном пространстве координаты вектора часто определяются через его геометрические проекции на оси выбранного базиса. Если базис совпадает со стандартным декартовым, координаты вектора равны его проекциям на оси Ox, Oy и Oz. Эти значения интерпретируются как приращения по соответствующим направлениям.
В ℝ² вектор v с началом в точке A(x₁, y₁) и концом в точке B(x₂, y₂) имеет координаты (x₂ − x₁, y₂ − y₁). Геометрический смысл такой записи заключается в разложении перемещения на горизонтальную и вертикальную составляющие, каждая из которых соответствует одному базисному вектору.
В ℝ³ применяется аналогичный подход: координаты вектора определяются как разности соответствующих координат начальной и конечной точек. Полученный набор чисел (x₂ − x₁, y₂ − y₁, z₂ − z₁) однозначно задаёт вектор в стандартном базисе и используется при работе с пространственными перемещениями и направлениями.
При использовании произвольного, но геометрически заданного базиса, координаты определяются через проекции на направления базисных векторов. Если базис не ортонормированный, длины проекций не совпадают с координатами напрямую, и требуется учитывать углы между направлениями.
Для прикладных задач рекомендуется визуально проверять ориентацию базисных векторов и направление отсчёта координат. Неверное определение знака проекции приводит к зеркальному искажению результата, которое сложно обнаружить без геометрической интерпретации.
Проверка корректности координат: восстановление вектора и типовые ошибки
Корректность найденных координат проверяется через восстановление исходного вектора. Для этого координатный столбец подставляется в линейную комбинацию базисных векторов. Если результат в точности совпадает с исходным вектором в стандартных координатах, вычисления выполнены верно.
Процедура восстановления выполняется в фиксированном порядке и не допускает перестановок базисных векторов:
- умножить каждую координату на соответствующий базисный вектор;
- просуммировать полученные векторы;
- сравнить результат с исходным вектором по всем компонентам.
При несовпадении результатов следует последовательно проверить ключевые этапы вычислений. Наиболее распространённые ошибки имеют повторяющийся характер:
- перепутан порядок базисных векторов при записи координатного столбца;
- использован неверный базис при составлении системы уравнений;
- применена матрица перехода в неправильном направлении;
- проигнорирована нормировка базисных векторов в ортогональном базисе;
- допущены арифметические ошибки при приведении системы к ступенчатому виду.
Для повышения надёжности рекомендуется выполнять проверку альтернативным способом, например повторно вычислить координаты через другой метод или сравнить длину восстановленного вектора с длиной исходного. Несовпадение хотя бы одного параметра указывает на ошибку, требующую пересмотра вычислений.
Вопрос-ответ:
Почему координаты одного и того же вектора меняются при выборе другого базиса?
Координаты показывают, с какими коэффициентами вектор раскладывается по базисным векторам. При смене базиса меняется сам набор направлений, по которым ведётся разложение. Геометрически вектор остаётся тем же, но числовые коэффициенты при новых базисных векторах будут другими.
Можно ли находить координаты вектора без решения системы линейных уравнений?
Да, если базис ортонормированный. В этом случае каждая координата вычисляется как скалярное произведение вектора на соответствующий базисный вектор. При произвольном базисе такой подход не работает, и приходится составлять систему уравнений.
Как понять, что заданный набор векторов действительно образует базис?
Необходимо проверить линейную независимость. На практике это делается через определитель матрицы, составленной из этих векторов: ненулевой определитель означает, что базис корректен. В двумерном и трёхмерном случае дополнительную подсказку даёт отсутствие коллинеарности и компланарности.
Чем координатный столбец отличается от обычной записи координат вектора?
Координатный столбец — это форма записи координат, используемая при матричных вычислениях. Он подчёркивает порядок координат и позволяет напрямую выполнять умножение на матрицы перехода и линейных преобразований. По смыслу значения те же, меняется только форма представления.
Как проверить результат перехода между базисами, если полученные числа выглядят неожиданно?
Нужно восстановить вектор в стандартных координатах, используя найденные координаты и новый базис. Если восстановленный вектор совпадает с исходным, переход выполнен верно. Также полезно проверить, не перепутано ли направление перехода и используется ли обратная матрица там, где это требуется.
Почему при вычислении координат в ортогональном, но ненормированном базисе нельзя сразу использовать скалярное произведение?
Скалярное произведение даёт длину проекции вектора на направление базисного вектора, умноженную на длину этого базисного вектора. Если векторы базиса не имеют единичной длины, полученное число не совпадает с координатой разложения. В таком случае требуется делить результат скалярного произведения на квадрат длины соответствующего базисного вектора или предварительно привести базис к нормированному виду.