
Содержание статьи

Выбор последовательного интерфейса для микроконтроллера напрямую влияет на допустимую скорость обмена, допустимый уровень помех и требования к согласованию тактирования. В проектах на базе STM32, AVR или ESP32 инженеры нередко сталкиваются с ситуацией, когда контроллер поддерживает оба варианта, но поведение интерфейсов заметно различается при работе с периферией, датчиками и модулями связи.
UART формирует кадры без опоры на внешний тактовый сигнал, поэтому точность внутреннего генератора определяет устойчивость передаваемых данных. Это особенно заметно при скоростях выше 115200 бод и длинных линиях. USART опирается на внешний или внутренний тактовый источник и может работать как в асинхронном, так и в синхронном режиме, что позволяет точнее согласовать обмен между двумя микросхемами.
Практическая разница проявляется в задачах: подключение GPS-приёмника, модуля LoRa или Bluetooth-чипа требует разных настроек стоп-битов, длины слова и способов контроля ошибок. Понимание того, какие функции заложены в конкретную периферию микроконтроллера, помогает избежать сбоев при запуске протоколов и снижает риск некорректной работы при нестабильной частоте генератора.
Форматы кадров в UART и их практическое влияние на передачу данных
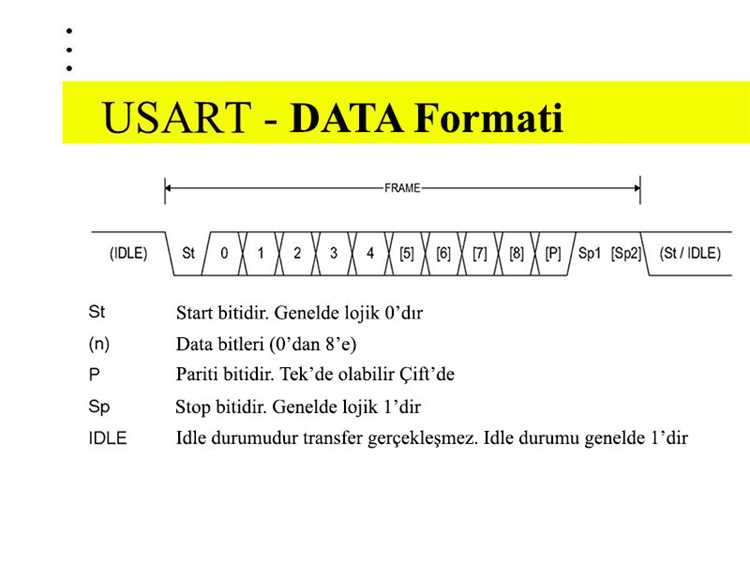
Кадр UART состоит из стартового бита, 5–9 бит данных, необязательного бита чётности и одного или двух стоп-битов. Изменение этих параметров влияет на допустимую длину линии, устойчивость к искажениям и требования к точности генератора. Например, при использовании 7-битных данных и двух стоп-битов возрастает временной запас между кадрами, что снижает риск ошибок на длинных проводниках.
Выбор бита чётности оправдан при подключении датчиков, работающих на скоростях до 57600 бод, где вероятность одиночных искажений выше. В проектах с высокой скоростью обмена надёжнее отключать контроль чётности и использовать более короткие кадры, так как дополнительный бит увеличивает нагрузку на линию и снижает фактическую пропускную способность.
При подключении модулей GPS, GSM и LoRa рекомендуется фиксировать формат 8N1, поскольку большинство из них рассчитаны на этот тип кадра и плохо реагируют на нестандартные комбинации. Внутри одной системы формат кадров должен совпадать у всех устройств, иначе приёмник интерпретирует данные как смещённые по разрядам, что выражается в нарушении структуры сообщений.
Особенности синхронизации в USART при работе с внешним тактовым сигналом
В синхронном режиме USART использует внешний тактовый сигнал, подаваемый на вход CK, что обеспечивает фиксированное положение каждого бита внутри кадра. Это снижает требования к точности внутренних генераторов микроконтроллеров и позволяет передавать данные без дрожания фазы, характерного для асинхронного обмена. При частотах выше 1 МГц такая схема даёт более стабильный фронт выборки и уменьшает количество повторных запросов к периферии.
Ниже приведена таблица, которая отражает влияние параметров внешнего тактирования на работу USART:
| Параметр | Практический эффект |
|---|---|
| Частота CK | Рост скорости обмена при сохранении устойчивой выборки битов |
| Крутизна фронтов | Снижение вероятности ложных выборок при работе на длинных линиях |
| Режим Master/Slave | Определяет необходимость генерации или приёма внешнего тактового сигнала |
| Согласование линии CK | Уменьшение отражений и фазовых искажений при высоких частотах |
Сравнение методов контроля ошибок в UART и USART на уровне битовых полей
Механизмы обнаружения ошибок в UART и USART различаются набором доступных флагов и расположением битов в регистрах статуса. Это влияет на способ обработки сбоев и требования к обработчикам прерываний. Ниже приведены ключевые поля, используемые при приёме данных, а также особенности их применения.
- Parity Error (PE) – фиксирует нарушение чётности. В UART применяется только при включённом бите чётности, а в USART задействуется также в синхронном режиме, где стабильность тактового сигнала снижает вероятность ложных срабатываний.
- Framing Error (FE) – указывает на неверное положение стоп-бита. В UART чаще возникает при несовпадении скоростей или дрейфе генератора, тогда как в USART этот флаг появляется в основном при ошибках синхронизации внешнего CK.
- Noise Error (NE) – регистрирует искажение уровня на линии RX. USART обрабатывает этот флаг быстрее за счёт фиксированного времени выборки, тогда как UART чувствительнее к помехам на длинных проводниках.
- Overrun Error (ORE) – сообщает о переполнении приёмного буфера. При высокой скорости USART генерирует этот флаг при несвоевременном чтении DR, в UART такое состояние чаще связано с недостаточной частотой обработки прерываний.
Для систем с высокой плотностью обмена данные флаги рекомендуется проверять в строгой последовательности, чтобы исключить неверную интерпретацию состояния периферии. Пример предпочтительного порядка:
- Проверка ORE с возможной очисткой FIFO или перезапуском интерфейса.
- Проверка FE для оценки корректности структуры кадра.
- Анализ PE и обработка кадров с нарушенной чётностью.
- Регистрация NE для статистики помех и последующей корректировки длины линии или скорости обмена.
Такой порядок уменьшает количество некорректных чтений регистра данных и способствует стабильной работе приёмника при скоростях от 115200 до 2 Мбит/с.
Поведение UART и USART при передаче данных с нестабильной частотой

Нестабильность тактовой частоты приводит к увеличению джиттера и ухудшению синхронизации. UART и USART реагируют на это по-разному из-за различий в способах выборки и привязки к опорному сигналу.
-
UART: Формирует синхронизацию только по стартовому биту и далее полагается на внутренний делитель. При дрейфе более ±2–3 % возрастает риск смещения точки выборки за пределы допустимого окна. Это заметно на скоростях выше 115200 бод.
-
USART в асинхронном режиме: Поведение аналогично UART, но многие контроллеры используют 16-кратную или 8-кратную сверхвыборку. Это улучшает устойчивость к дрейфу, снижая вероятность ошибок при частотном отклонении до ±4–5 %.
-
USART в синхронном режиме: Нестабильность частоты заметно ниже, так как передатчик подаёт такт на приёмник. Ошибки возникают только при сильной неравномерности фронтов или при некачественной линии.
Практические рекомендации:
- Использовать сверхвыборку 16× при асинхронном обмене, если это поддерживает контроллер.
- При нестабильном генераторе снижать скорость передачи до уровня, при котором суммарное отклонение не превышает ±2 % для UART и ±4 % для USART.
- Применять кварцевой резонатор вместо RC-генератора при скоростях выше 57 600 бод.
- Для критичных каналов переводить USART в синхронный режим с общим тактовым проводом.
- Контролировать форму фронтов и длину трасс, так как паразитные искажения усиливают последствия частотного дрейфа.
Настройка скоростей передачи в UART и USART для разных микроконтроллеров
Скорость передачи (baud rate) задаётся делителем тактового сигнала и влияет на точность синхронизации. Для разных семейств микроконтроллеров методы расчёта делителя различаются.
-
AVR (ATmega, ATtiny): Формула: UBRR = F_CPU / (16 × baud) — 1 для асинхронного режима с 16× сверхвыборкой. При скорости 115200 бод и F_CPU = 16 МГц UBRR = 8, что даёт отклонение около 2 %.
-
STM32 (USART): Делитель рассчитывается по формуле: USARTDIV = F_APB / baud. Для высоких скоростей рекомендуется использовать oversampling 16×. Например, F_APB = 72 МГц, baud = 115200, USARTDIV ≈ 625.
-
ESP32 (UART): Использует 20-битный регистр делителя. Формула: DIV = F_CLK / baud. Рекомендуется оставлять запас ±1 % для компенсации нестабильности внутреннего RC-генератора.
Рекомендации по выбору скорости:
- При работе на нестабильных кварцах снижать скорость передачи на 50–100 % ниже максимальной.
- Сверхвыборка 16× для асинхронного USART обеспечивает минимизацию ошибок до ±4 % при дрейфе частоты.
- Для микроконтроллеров с ограниченной тактовой точностью (RC-генератор) использовать стандартные скорости: 9600, 19200, 38400 бод.
- При синхронном режиме скорость можно подбирать практически вплоть до половины частоты шины передачи, ограничивая линию кабеля и время фронта сигнала.
- Тестировать фактический baud rate с логическим анализатором при переходе на высокие скорости, особенно на STM32 и ESP32.
Работа с буферизацией и прерываниями в UART и USART в реальных проектах
Буферизация и прерывания критичны для стабильной работы UART и USART при обмене данными с высокой скоростью или с множеством периферийных устройств.
-
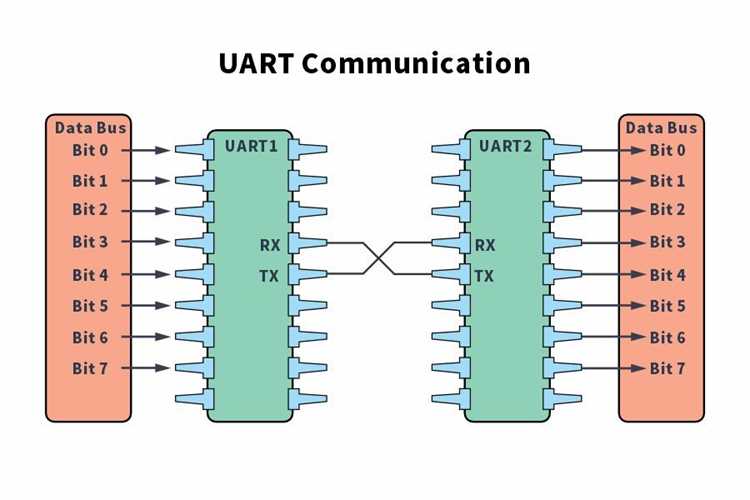
UART: Обычно имеет одноуровневый аппаратный FIFO приёмника и передатчика (1–16 байт в зависимости от контроллера). Приём данных вне прерываний приводит к потере байтов при высоких скоростях. Использование программного кольцевого буфера в сочетании с прерываниями RX позволяет обрабатывать поток без блокировки основной логики.
-
USART: Поддерживает расширенные FIFO (до 128 байт на STM32) и аппаратные механизмы DMA. Прерывания можно настраивать на полный/пустой FIFO, приём байта или окончание передачи. Это уменьшает нагрузку на CPU при скорости >115200 бод.
-
Прерывания RX: Позволяют захватывать данные сразу после прихода байта. Рекомендуется использовать кольцевой буфер размером минимум в 4–8 раз больше ожидаемого пикового блока данных.
-
Прерывания TX: Используются для передачи больших блоков данных без блокировки CPU. В сочетании с DMA обеспечивают непрерывный поток до сотен килобайт в секунду.
-
Рекомендации для проектов:
- Всегда резервировать буфер приёмника на случай непредвиденных задержек в обработке.
- При использовании UART на малых микроконтроллерах ограничивать скорость передачи до 115200 бод, иначе требуется DMA или внешняя FIFO.
- USART на STM32 и ESP32 следует конфигурировать с прерываниями + DMA для стабильного приёма потоков >1 Мбит/с.
- Использовать контрольные суммы или CRC при передаче больших блоков для выявления потерь байтов из-за переполнения буфера.
Совместимость периферии: когда UART может заменить USART и наоборот
UART и USART используют совместимый асинхронный протокол, поэтому в большинстве случаев UART может заменить USART в асинхронном режиме, если не требуется синхронная передача или высокоскоростной обмен.
-
UART вместо USART: Подходит для обмена с простыми датчиками, GPS-модулями, Bluetooth-адаптерами. Ограничения: невозможно использовать синхронный режим, аппаратные линии CTS/RTS доступны только при поддержке аппаратного управления потоком.
-
USART вместо UART: Может полностью заменить UART на любой скорости, обеспечивая сверхвыборку 8× или 16×, аппаратные FIFO и поддержку DMA. Рекомендуется при нестабильной тактовой частоте или при передаче больших блоков данных.
-
Совместимость по уровню сигналов: UART и USART с TTL-уровнем 3,3 В или 5 В взаимозаменяемы. Для RS-232 требуется преобразователь уровня (MAX232 или аналог).
-
Практические рекомендации:
- Для простых проектов с низкой скоростью и минимальными требованиями к синхронизации UART достаточно.
- При высоких скоростях (>115200 бод) или длинных линиях лучше использовать USART с аппаратной FIFO и DMA.
- Если планируется переход между асинхронным и синхронным режимом, использовать USART, так как UART такой возможности не предоставляет.
Выбор интерфейса для связи между микроконтроллерами в условиях помех
Выбор между UART и USART определяется требуемой устойчивостью к электромагнитным помехам и надежностью передачи при нестабильных линиях.
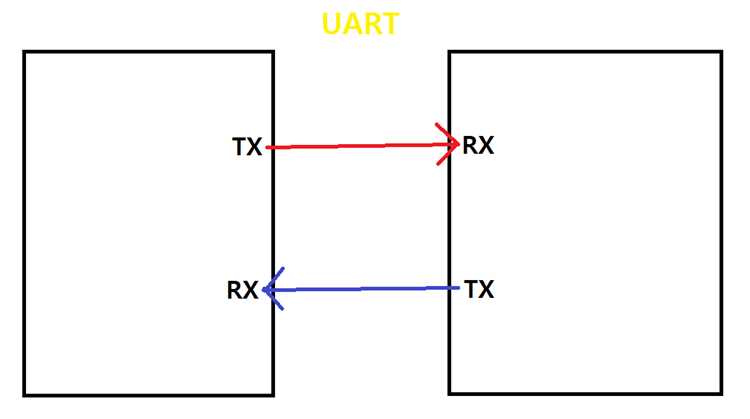
UART в чистом виде использует асинхронный протокол с одной линией передачи и приёмника. При длине линии >1 м или наличии сильных помех увеличивается вероятность потери байтов. Применение дифференциального драйвера (RS-485) и экранированного кабеля повышает помехоустойчивость.
USART в асинхронном режиме обладает преимуществом за счет сверхвыборки 16×, что позволяет корректно считывать данные при дрейфе частоты до ±4–5 %. В синхронном режиме передача синхронизирована тактовым сигналом, что минимизирует влияние внешних помех на линию передачи.
Рекомендации:
- Для коротких линий (<1 м) и низкой скорости (<115200 бод) UART обеспечивает достаточную надежность.
- Для длинных линий, высоких скоростей или среды с сильными помехами использовать USART в синхронном режиме или с подключением по RS-485.
- Использовать фильтры по питанию и экранирование кабелей, независимо от интерфейса.
- При необходимости передачи больших блоков данных выбирать USART с аппаратной FIFO и DMA для снижения вероятности переполнения буфера.
Вопрос-ответ:
В чем ключевое отличие UART от USART в аппаратной реализации?
UART работает исключительно в асинхронном режиме, используя стартовый и стоповый биты для синхронизации, тогда как USART может работать как асинхронно, так и синхронно с внешним тактовым сигналом. Это позволяет USART использовать синхронную передачу для увеличения скорости и устойчивости к дрейфу частоты. В микроконтроллерах USART часто снабжен расширенными FIFO и возможностью подключения DMA, чего нет в стандартном UART.
Как нестабильность тактового генератора влияет на передачу данных через UART и USART?
При дрейфе частоты UART теряет точность выборки, и при отклонении более ±2–3 % возможны ошибки приема. USART с сверхвыборкой 16× выдерживает отклонения до ±4–5 %, что снижает риск пропусков или смещения байтов. В синхронном режиме USART влияние нестабильного генератора минимально, так как приёмник синхронизирован с тактовым сигналом передатчика.
Можно ли использовать UART вместо USART при подключении датчиков или модулей связи?
Да, если датчик или модуль поддерживает асинхронный протокол и не требует высоких скоростей или аппаратного управления потоком. В этом случае UART заменяет USART в асинхронном режиме. Но для синхронной передачи или потоков с высокой скоростью лучше использовать USART, так как UART не поддерживает синхронизацию по внешнему такту и расширенные FIFO.
Как настроить скорость передачи в UART и USART на разных микроконтроллерах для точного обмена?
В AVR делитель задается формулой UBRR = F_CPU / (16 × baud) — 1 для асинхронного режима. В STM32 USARTDIV = F_APB / baud с выборкой 16× для точности. В ESP32 DIV = F_CLK / baud с резервом ±1 % из-за RC-генератора. Практически рекомендуется тестировать фактическую скорость с логическим анализатором, снижать скорость при нестабильных генераторах и выбирать стандартные значения: 9600, 19200, 38400, 115200 бод.
Какие методы буферизации и прерываний стоит использовать в проектах с высокоскоростной передачей?
Для UART желательно применять кольцевой программный буфер с прерываниями при приеме байта, чтобы исключить потерю данных при высоких скоростях. USART с аппаратной FIFO и DMA позволяет передавать и принимать большие блоки данных без блокировки CPU. Прерывания RX активируются при каждом принятом байте, а TX — при освобождении места в буфере. Для потоков выше 115200 бод рекомендуется использовать USART с DMA, чтобы обработка не задерживалась основной программой.





