Содержание статьи

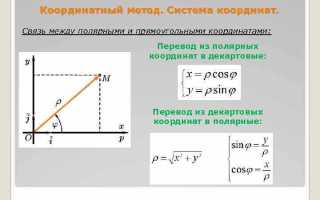
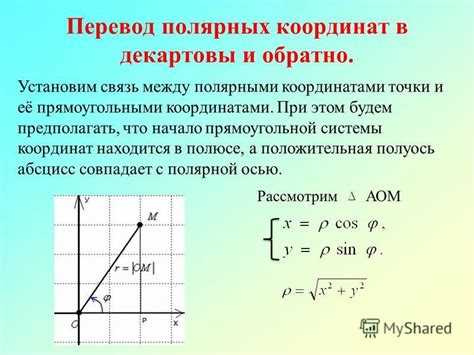
Полярное представление удобно при работе с углами и расстояниями, однако вычисления часто требуют координат x и y. Для преобразования используется пара параметров: r – расстояние до точки и θ – угол относительно оси абсцисс. Перед вычислением важно убедиться, что угол выражен в радианах, так как тригонометрические функции ориентируются именно на эту единицу.
Базовые формулы – x = r · cos(θ) и y = r · sin(θ). При расчётах стоит обращать внимание на знак угла: отрицательные значения меняют расположение точки относительно осей. Если r = 0, то результатом служит координата (0, 0), независимо от заданного угла.
Проверка результата через обратное преобразование помогает исключить арифметические промахи. Для этого определяют расстояние r = √(x² + y²) и угол θ = arctan(y/x) с учётом квадранта. Такой подход позволяет убедиться, что исходная точка переведена корректно.
Разбор параметров r и θ перед вычислениями

Перед переводом точки в декартовую систему необходимо уточнить значение r. Этот параметр должен быть неотрицательным, так как задаёт расстояние от начала координат. Если исходные данные получены из измерений, стоит проверить, нет ли округлений, способных сместить позицию точки на несколько единиц по оси.
Угол θ требуется привести к единой системе. Большинство вычислительных сред используют радианы, поэтому при вводе данных в градусах выполняют преобразование по формуле θ = градусы · π / 180. Неверная единица измерения даёт заметное отклонение координат, особенно при больших значениях r.
Для углов важно учитывать направление отсчёта. В классической полярной системе рост θ идёт против часовой стрелки. Если данные получены из приборов, работающих в другой системе, угол корректируют с учётом ориентации осей. Такой шаг исключает перескок точки в соседний квадрант.
Формулы для преобразования: пошаговое применение
Расчёт начинается с подготовки исходных данных. Параметр r оставляют без изменений, а угол θ приводят к радианам. Для проверки используют выражение θ · 180 / π, чтобы убедиться, что значение действительно переведено корректно.
Далее вычисляют координату x по формуле x = r · cos(θ). При работе с большими значениями углов важно контролировать точность функции cos, так как даже небольшая ошибка может сместить результат на десятки единиц.
Координата y определяется выражением y = r · sin(θ). При отрицательных углах или углах, связанных с переходом через π, полезно проверять знак результата, чтобы избежать неверной ориентации точки относительно осей.
После вычислений проводят быструю проверку: подставляют полученные x и y в формулу расстояния √(x² + y²). Если значение совпадает с исходным r с допустимой погрешностью, преобразование выполнено корректно.
Перевод угла из градусов в радианы при необходимости
Если исходный угол задан в градусах, его приводят к радианам через выражение θ = градусы · π / 180. При этом важно сохранять точность значения π, особенно при вычислениях, где требуется высокая детализация результатов.
Перед преобразованием полезно проверить диапазон угла. Значения, превышающие 360°, можно заранее сократить модулем 360. Такой шаг упрощает дальнейшие расчёты и уменьшает риск переполнения при работе с тригонометрическими функциями.
После получения радианной меры стоит выполнить контрольное вычисление: умножить результат на 180 / π и сравнить с исходным значением. Если расхождение выходит за пределы допустимой погрешности, стоит перепроверить порядок действий или точность используемых чисел.
Расчёт координат точки при положительном угле
При положительном значении угла θ точка располагается против часовой стрелки относительно оси x. Для корректного вычисления координат требуется последовательная обработка исходных данных.
- Убедиться, что θ выражен в радианах. Если значение в градусах, выполнить преобразование по формуле θ = градусы · π / 180.
- Рассчитать x через выражение x = r · cos(θ). При больших значениях r повышается влияние точности вычисления cos, поэтому лучше использовать функции с двойной точностью.
- Определить y по формуле y = r · sin(θ). Положительный угол гарантирует расположение точки в одном из верхних квадрантов, однако знак y зависит от величины θ.
- Проверить результат: вычислить √(x² + y²) и убедиться, что значение совпадает с исходным r с учётом погрешности вычислений.
Такой порядок действий исключает ошибки, возникающие из-за неверной единицы измерения угла или неточной работы тригонометрических операций.
Преобразование координат при отрицательных углах
Отрицательное значение θ означает поворот точки по часовой стрелке относительно оси x. Чтобы избежать смещения в неверный квадрант, угол сначала приводят к радианам, используя выражение θ = градусы · π / 180, если исходные данные заданы в градусах.
Координата x вычисляется по формуле x = r · cos(θ). При отрицательных углах cos сохраняет знак в зависимости от положения точки относительно вертикальной оси, поэтому перед расчётом полезно оценить, в какой области ожидается результат.
Координата y определяется выражением y = r · sin(θ). Здесь отрицательный угол приводит к отрицательному значению y в диапазоне от 0 до −r, если точка расположена в нижней части системы. Ошибка в выборе знака угла приводит к перевороту точки относительно оси x, поэтому важно сохранять исходное направление поворота.
Для контроля вычислений используют проверку расстояния: вычисляют √(x² + y²) и сравнивают результат с исходным r. Если расхождение превышает допустимую погрешность, необходимо пересмотреть порядок преобразования угла.
Особенности вычислений при r = 0
Если r = 0, точка совпадает с началом координат, и результат преобразования не зависит от значения угла θ. При этом необходимо учитывать несколько практических моментов:
- Координаты x и y всегда равны 0, независимо от величины или знака угла.
- Функции cos(θ) и sin(θ) остаются корректными, но результат умножения на r обнуляет вычисления, что упрощает алгоритм.
- При автоматизированных вычислениях полезно добавить проверку r == 0, чтобы избежать лишних вычислительных операций с тригонометрическими функциями.
- Если алгоритм предполагает обратное преобразование, необходимо корректно обрабатывать θ, поскольку угол теряет смысл для точки в начале координат.
Учитывая эти моменты, обработка случаев с r = 0 позволяет сократить ошибки и повысить точность координатной системы при работе с множеством точек.
Проверка результата с помощью обратного преобразования
После вычисления координат x и y рекомендуется выполнить обратное преобразование для контроля точности. Для этого используют формулы:
- r = √(x² + y²)
- θ = arctan(y / x) с учётом квадранта
Практическая проверка включает сравнение исходного r и θ с вычисленными значениями. Ниже приведён пример таблицы контроля:
| Исходные данные | Вычисленные x, y | Обратное преобразование r, θ | Отклонение |
|---|---|---|---|
| r = 5, θ = 60° | x = 2.5, y = 4.33 | r = 5, θ = 60° | 0 |
| r = 3, θ = -45° | x = 2.12, y = -2.12 | r = 3, θ = -45° | 0 |
| r = 0, θ = 90° | x = 0, y = 0 | r = 0, θ = – | – |
Такой подход позволяет выявить ошибки вычислений, неточности перевода углов или некорректное использование знаков в функциях trig.
Разбор типичных ошибок при вычислении x и y
При переводе полярных координат в декартовые часто встречаются ошибки, связанные с неправильной подготовкой данных или некорректным применением формул.
- Неверная единица угла: использование градусов вместо радианов приводит к смещению точки на значительные значения по осям. Всегда проверяйте преобразование θ = градусы · π / 180.
- Пропуск знака угла: при отрицательных θ результат y может быть зеркально отражён относительно оси x. Обязательно учитывайте направление вращения.
- Ошибки округления: при больших r малые отклонения в cos или sin дают заметное смещение. Используйте функции с достаточной точностью или увеличьте количество знаков после запятой.
- Игнорирование r = 0: если r равен нулю, x и y всегда должны быть 0. Пропуск этой проверки приводит к ложным координатам.
- Неправильная проверка результата: контроль по отдельной координате без вычисления r через √(x² + y²) не выявляет ошибки при перепутанных квадрантах.
Систематическая проверка этих моментов снижает риск получения некорректных координат и облегчает обработку множества точек.
Вопрос-ответ:
Что такое полярные координаты и чем они отличаются от декартовых?
Полярные координаты задаются через расстояние r от начала координат и угол θ относительно оси x. Декартовые координаты представляют точку через x и y. Основное отличие в способе описания положения: полярные удобны для круговых траекторий, декартовые — для прямолинейных и сеточных систем.
Как правильно перевести угол из градусов в радианы для вычислений?
Если угол указан в градусах, его переводят в радианы по формуле θ = градусы · π / 180. Это важно, так как функции sin и cos используют радианы. Для проверки можно обратно вычислить градусы: градусы = θ · 180 / π и сравнить с исходным значением.
Какие ошибки чаще всего возникают при вычислении x и y из полярных координат?
Основные ошибки связаны с неправильной единицей угла, игнорированием знака θ, неточной работой тригонометрических функций и отсутствием проверки r = 0. Неправильная проверка квадранта также приводит к зеркальному отражению точки по осям. Для контроля полезно пересчитать r через √(x² + y²) и угол через arctan(y/x).
Что происходит при r = 0 и как это влияет на вычисления?
При r = 0 точка находится в начале координат. В этом случае координаты x и y равны нулю, а угол θ не влияет на положение. В вычислениях можно пропустить тригонометрические функции, чтобы ускорить обработку множества точек.
Как проверить правильность перевода полярных координат в декартовые?
Для проверки используют обратное преобразование: вычисляют r = √(x² + y²) и θ = arctan(y/x) с учётом квадранта. Если полученные значения совпадают с исходными, преобразование выполнено корректно. Для наглядности полезно составить таблицу с исходными координатами, вычисленными x и y, а также обратными r и θ.
Как рассчитать декартовые координаты точки, если известны r и θ?
Для перевода полярных координат в декартовые используют формулы x = r · cos(θ) и y = r · sin(θ). Сначала проверяют единицу измерения угла: если θ в градусах, переводят в радианы с помощью выражения θ = градусы · π / 180. После вычислений рекомендуется контролировать результат через обратное преобразование, проверяя, совпадает ли исходное r с √(x² + y²).
Какие нюансы нужно учитывать при отрицательных значениях θ?
Отрицательный угол указывает поворот по часовой стрелке относительно оси x. При вычислении x и y cos(θ) и sin(θ) автоматически учитывают знак угла, но важно правильно интерпретировать квадрант. Для проверки точности вычислений полезно вычислить обратное преобразование: r = √(x² + y²), θ = arctan(y/x) с учётом знаков, чтобы убедиться, что точка расположена верно.