Содержание статьи

Контурная обработка позволяет выделять границы объектов на снимках для дальнейшего анализа. В OpenCV это достигается комбинацией преобразований: перевод изображения в градации серого, подавление шумов, пороговая обработка и вычисление границ. Такой подход нужен при распознавании предметов, подготовке данных для нейросетей и анализе формы объектов.
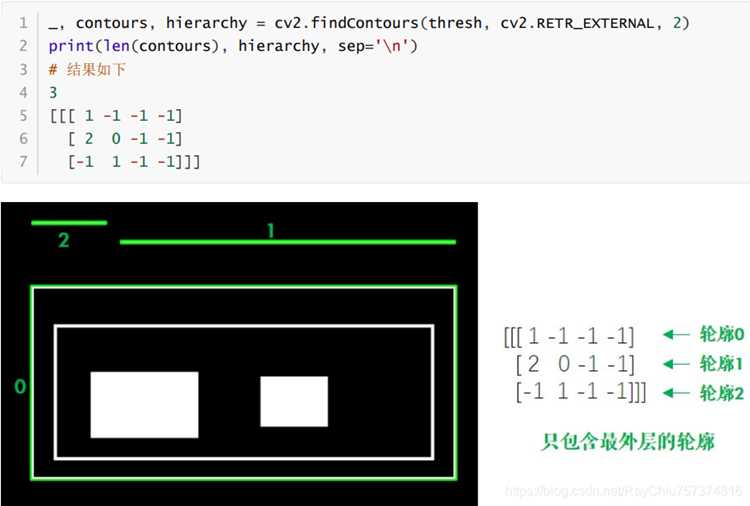
При работе с cv2.findContours важно учитывать режим извлечения: RETR_EXTERNAL оставляет только внешние границы, а RETR_TREE сохраняет древовидную структуру вложенности. Для задач с мелкими деталями стоит заранее подбирать параметры пороговой обработки или фильтрации, чтобы исключать ложные контуры.
Практические результаты зависят от качества предварительной подготовки изображения. При избыточных шумах алгоритм выделяет множество артефактов, поэтому полезно применять размытие или морфологические операции. Корректная настройка этих этапов задаёт основу для точного анализа контуров и последующей обработки.
Подготовка изображения к выделению границ через преобразование в градации серого
Преобразование в градации серого снижает влияние цветовых каналов и упрощает дальнейшие операции с границами. В OpenCV это выполняется функцией cv2.cvtColor с параметром cv2.COLOR_BGR2GRAY. Результирующее одноканальное изображение уменьшает количество вычислений и делает пороговую обработку более предсказуемой.
Перед преобразованием полезно убедиться, что исходный файл загружен без искажений. Если используется cv2.imread, стоит проверить, не вернул ли она None из-за неправильного пути. Некорректный файл приводит к появлению шумов и последующим ошибкам при поиске контуров.
После перевода в градации серого желательно снизить случайные колебания яркости. Для этого применяют cv2.GaussianBlur с размером ядра 3×3 или 5×5. Сглаживание устраняет мелкие артефакты, благодаря чему пороговые методы и оператор Canny выделяют границы более стабильно.
Применение пороговой обработки и выбор порога для корректного выделения объектов
Пороговая обработка переводит изображение в бинарный формат, где объекты отделяются от фона по значению яркости. В OpenCV используется функция cv2.threshold, позволяющая задать порог вручную или применить автоматический расчёт. Жёсткий порог подходит для снимков с устойчивым освещением, а автоматические методы обеспечивают более точное разделение в условиях перепадов яркости.
Для задач, где фон и объект отличаются неравномерно, применяют cv2.adaptiveThreshold. Этот метод определяет порог отдельно для каждого участка, что снижает влияние теней и локальных засветок. Правильный выбор параметров блока и смещения позволяет получить чистые границы для последующего поиска контуров.
| Метод | Особенность | Подходящие случаи |
|---|---|---|
| THRESH_BINARY | Фиксированный порог | Стабильное освещение, чёткое разделение фона и объекта |
| THRESH_OTSU | Автоматический расчёт порога | Размытая граница между классами яркости |
| Adaptive Mean/Gaussian | Порог для локальных областей | Неравномерное освещение, наличие теней |
Перед выбором метода стоит оценить распределение яркости на гистограмме. Если два яркостных пика выражены достаточно ясно, OTSU выдаёт хороший результат. При отсутствии выраженной структуры безопаснее использовать адаптивный подход, чтобы исключить потерю деталей на областях с перепадами яркости.
Использование метода Canny для получения исходных границ объектов

Перед применением Canny целесообразно выполнить сглаживание, чтобы убрать высокочастотный шум, иначе на выходе появляется множество ошибочных откликов. Для этого используют cv2.GaussianBlur, что уменьшает количество ложных границ и повышает стабильность результата.
При подборе порогов полезно анализировать градиентную карту. На снимках с контрастными объектами верхний порог можно установить в диапазоне 120–180, а нижний – около половины этого значения. Для кадров с низким контрастом требуется уменьшение обоих значений, иначе важные переходы не попадут в итоговую маску.
Canny формирует основу для дальнейшего поиска контуров через cv2.findContours, поэтому важно добиться ровной градиентной картины. При заметных провалах яркости стоит использовать предварительное выравнивание гистограммы, чтобы усилить слабые переходы и сохранить структуру объектов.
Извлечение контуров с помощью функции findContours и выбор режима и метода аппроксимации

Для работы cv2.findContours требуется бинарная маска, где фон представлен нулями, а объекты – ненулевыми значениями. Если маска содержит разрывы или участки с частично выделенными границами, функция формирует множество коротких сегментов вместо цельных линий. Поэтому перед извлечением контуров стоит убедиться, что пороговая обработка или Canny создают чёткую структуру переходов.
Выбор режима влияет на дальнейший анализ. Параметр cv2.RETR_EXTERNAL фиксирует только внешние границы, что удобно при работе с отдельными предметами на однородном фоне. cv2.RETR_LIST сохраняет все найденные элементы без иерархии, и этот вариант подходит для задач, где дальнейшая фильтрация проводится вручную. cv2.RETR_TREE формирует дерево вложенности, предоставляя информацию о том, какие контуры являются внутренними по отношению к другим.
Метод аппроксимации определяет объём данных. cv2.CHAIN_APPROX_SIMPLE удаляет промежуточные пиксели на прямых участках и оставляет только ключевые точки, что снижает размер массива координат. cv2.CHAIN_APPROX_NONE фиксирует каждую точку линии, что даёт максимальную детализацию, но повышает нагрузку на память и последующие алгоритмы.
После получения списка контуров полезно вычислить площадь и периметр каждого объекта через cv2.contourArea и cv2.arcLength. Это помогает исключить шумовые элементы, возникшие из-за остаточных артефактов. Контуры с минимальной длиной или площадью можно удалять заранее, чтобы избежать последующих искажений при анализе формы или построении ограничивающих фигур.
Фильтрация найденных контуров по площади, форме и вложенности
После извлечения контуров важно отфильтровать лишние элементы, возникающие из-за шумов или мелких артефактов. В OpenCV для этого применяют несколько критериев одновременно:
- Площадь: вычисляется через cv2.contourArea. Контуры с площадью меньше заданного порога удаляются, так как они часто не представляют значимых объектов.
- Периметр и аппроксимация: cv2.arcLength позволяет оценить длину контура. Короткие контуры можно исключить, чтобы убрать шумные линии.
- Форма: сравнение отношений сторон ограничивающего прямоугольника или коэффициентов формы позволяет исключить слишком вытянутые или почти линейные контуры.
- Вложенность: используя иерархию, возвращаемую cv2.findContours в режиме RETR_TREE, можно игнорировать внутренние контуры или выбирать только внешние для анализа.
Пример фильтрации по площади и форме:
- Вычислить площадь каждого контура.
- Удалить контуры с площадью меньше 100 пикселей.
- Построить ограничивающий прямоугольник и вычислить отношение ширины к высоте.
- Исключить контуры с отношением больше 5 или меньше 0.2.
- Оставить только внешние контуры при необходимости, проверяя уровень вложенности в иерархии.
Такой подход позволяет сосредоточиться на значимых объектах, уменьшить количество ложных срабатываний и подготовить данные к последующему анализу, например, распознаванию формы или построению ограничивающих областей.
Отрисовка выбранных контуров и сохранение результата в файл
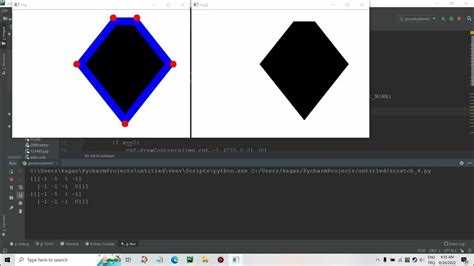
Для визуализации контуров используется функция cv2.drawContours. Она позволяет указать список контуров, индекс для отдельного объекта или -1 для отрисовки всех выбранных элементов. Цвет и толщина линии задаются в параметрах, например, (0, 255, 0) для зелёного и 2 пикселя.
Рекомендуется предварительно создать копию исходного изображения, чтобы сохранить оригинал без изменений. Контуры можно отрисовывать на пустом фоне, если требуется отдельная маска, или поверх исходного снимка для наглядного сравнения с оригинальными объектами.
После отрисовки итоговое изображение сохраняется через cv2.imwrite, где указывается путь и имя файла, а также формат (например, PNG или JPEG). Важно выбирать формат без сжатия с потерями для точного сохранения границ, особенно при последующем анализе или измерениях.
Пример использования:
- Создать копию изображения: output = image.copy()
- Отрисовать контуры: cv2.drawContours(output, contours, -1, (0, 255, 0), 2)
- Сохранить результат: cv2.imwrite(‘result.png’, output)
Такая последовательность позволяет зафиксировать выделенные границы для анализа формы, вычисления площади или передачи данных в другие алгоритмы без потери исходной информации.
Вопрос-ответ:
Зачем преобразовывать изображение в градации серого перед поиском контуров?
Преобразование в градации серого упрощает обработку, поскольку алгоритмы поиска контуров работают с одноканальными изображениями. Цветные изображения содержат три канала, и их прямое использование увеличивает вычислительную нагрузку и может вызвать ложные границы. После перевода в оттенки серого можно применить пороговую обработку или Canny для точного выделения объектов.
Как правильно выбрать порог для бинаризации изображения перед извлечением контуров?
Выбор порога зависит от контрастности объекта и фона. Для равномерно освещённых снимков достаточно фиксированного порога через cv2.threshold. Если освещение неравномерное, лучше использовать cv2.adaptiveThreshold, который рассчитывает порог локально для каждого участка. Неправильно установленный порог приводит к потере деталей или появлению множества ложных контуров.
В чём разница между режимами извлечения контуров RETR_EXTERNAL и RETR_TREE?
Режим RETR_EXTERNAL сохраняет только внешние контуры объектов, игнорируя внутренние отверстия. Это удобно для анализа отдельных предметов. Режим RETR_TREE формирует иерархию всех контуров, включая вложенные, что позволяет различать внешние и внутренние границы и использовать их при вычислении структуры сложных объектов.
Когда стоит использовать аппроксимацию CHAIN_APPROX_SIMPLE вместо CHAIN_APPROX_NONE?
Метод CHAIN_APPROX_SIMPLE удаляет промежуточные точки на прямых участках контура, оставляя только ключевые вершины. Это уменьшает размер массива координат и ускоряет последующую обработку без потери формы объекта. CHAIN_APPROX_NONE сохраняет все пиксели, что может быть необходимо при точном измерении границ или при построении масок высокой точности.
Как фильтровать контуры по площади и форме для исключения шумов?
После извлечения контуров можно вычислить площадь через cv2.contourArea и периметр через cv2.arcLength. Контуры с площадью или длиной ниже порога обычно являются шумом и удаляются. Для оценки формы используют отношение ширины к высоте ограничивающего прямоугольника или коэффициенты формы, чтобы исключить слишком вытянутые или почти линейные объекты. Такой подход помогает оставить только значимые элементы для дальнейшего анализа.
Почему после применения Canny появляются лишние контуры на изображении?
Лишние контуры возникают из-за шума или мелких текстур на изображении. Алгоритм Canny фиксирует все резкие изменения яркости, включая случайные пиксели. Чтобы уменьшить количество артефактов, перед применением Canny используют сглаживание через cv2.GaussianBlur, а также корректируют верхний и нижний пороги. Дополнительно после извлечения контуров можно фильтровать элементы по площади или периметру, исключая слишком маленькие объекты.
Как правильно отрисовать контуры и сохранить результат для дальнейшего анализа?
Контуры отрисовываются функцией cv2.drawContours, где указывают список контуров, индекс (или -1 для всех) и цвет линии. Рекомендуется использовать копию исходного изображения, чтобы сохранить оригинал. Толщина линии подбирается исходя из размера объектов. Итоговое изображение сохраняется через cv2.imwrite с форматом без сжатия для точного сохранения границ, например PNG. Такой файл можно использовать для последующего анализа формы, вычисления площади или передачи другим алгоритмам обработки.