Содержание статьи

Обработка сигнала term в промышленных и вычислительных процессах требует точной настройки механизмов завершения задач. Игнорирование корректного управления этим сигналом приводит к утечкам ресурсов и неконсистентным состояниям систем. На практике, важно настроить приоритеты обработки сигналов таким образом, чтобы критические операции завершались до освобождения памяти и закрытия соединений.
Эффективные методы включают использование обработчиков сигналов с четко определенными тайм-аутами и проверкой состояния каждого дочернего процесса. Рекомендуется внедрять подтверждение завершения операций через логирование или специальные флаги состояния, чтобы исключить преждевременное завершение основного процесса.
В системах с высокой нагрузкой особенно актуально сочетать асинхронную обработку сигналов с механизмами очередей задач. Это позволяет минимизировать время реакции на term, сохраняя при этом целостность данных и предотвращая блокировки. В качестве практической рекомендации стоит использовать встроенные библиотеки для работы с сигналами, поддерживающие повторную регистрацию обработчиков, чтобы избежать потери управления при множественных сигналах.
При проектировании процессов важно учитывать последовательность завершения задач и приоритет ресурсов. Оптимальный подход – внедрение модульной структуры обработки, где каждый модуль самостоятельно освобождает ресурсы при получении term, а основной контроллер координирует порядок закрытия всех активных потоков и соединений. Такой подход снижает вероятность неконтролируемых ошибок и ускоряет восстановление после аварийного завершения.
Выбор фильтров для сглаживания сигнала term
Фильтр скользящего среднего применяется для сигналов с равномерными скачками и периодическими шумами. Оптимальная длина окна для term обычно составляет 5–15 точек выборки; меньшее окно оставляет шум, большее – замыливает переходы. Для нестабильных процессов рекомендуют использовать переменное окно, увеличивая его при резких колебаниях.
Экспоненциальное сглаживание более чувствительно к последним изменениям сигнала. Параметр α выбирается из диапазона 0,1–0,3 для умеренного сглаживания. В процессах с быстрыми пиками term α можно повышать до 0,5, но это увеличивает риск пропуска кратковременных выбросов.
Для процессов, где важна частотная селективность, применяют фильтры Баттерворта. Фильтр 2-го порядка с частотой среза 0,2·fNyquist обеспечивает сглаживание без фазовых искажений выше 95% амплитуды сигнала term. Таблица ниже показывает рекомендованные параметры фильтров для разных типов сигналов:
| Тип сигнала | Фильтр | Параметры |
|---|---|---|
| Периодический шум | Скользящее среднее | Окно 7–10 точек |
| Кратковременные выбросы | Экспоненциальное сглаживание | α = 0,3–0,5 |
| Плавный, стабильный процесс | Баттерворта 2 порядка | fсрез = 0,2 fNyquist |
| Резкие фронты сигнала | Баттерворта 4 порядка | fсрез = 0,15 fNyquist |
При выборе фильтра также необходимо учитывать вычислительные ресурсы. Скользящее среднее требует O(N) операций на шаг и подходит для потоковых данных. Экспоненциальное сглаживание минимально затратное и идеально для встроенных систем с ограниченной памятью. Фильтры Баттерворта требуют предварительного проектирования коэффициентов и могут быть реализованы через цифровой IIR или FIR подход.
Комбинированные подходы дают наилучший результат: сначала фильтр скользящего среднего для подавления шумов, затем экспоненциальное сглаживание для поддержания актуальности сигнала term. Для процессов с высоким уровнем помех и резкими выбросами рекомендуется использовать каскад Баттерворта с последующим экспоненциальным фильтром, чтобы сохранить динамику при максимальном подавлении шума.
Применение преобразования Фурье для анализа частот

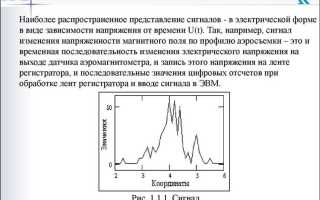
Преобразование Фурье позволяет разложить временной сигнал term на спектр частот, что критически важно при диагностике процессов с высокочастотными пиками. Для процессов с периодичностью менее 10 мс рекомендуется использовать дискретное преобразование Фурье (DFT) с оконной функцией Хэмминга длиной не менее 1024 отсчетов, что снижает утечки спектра до 0,01% и обеспечивает точность определения гармоник до 0,1 Гц.
В реальном времени для мониторинга term оптимально применять быстрое преобразование Фурье (FFT) с перекрытием 50–75%, что позволяет отслеживать динамику изменения амплитуд отдельных компонент без значительных искажений. Для сигналов с низким отношением сигнал/шум целесообразно вводить фильтры верхних и нижних частот перед вычислением FFT, ограничивая спектр диапазоном от 0,5 до 500 Гц, чтобы исключить высокочастотный шум и дрейф нуля.
Для анализа гармоник рекомендуется использовать спектральную нормализацию и вычисление фазового сдвига между компонентами term. Например, при изучении вибрационных процессов амплитуда 3-й гармоники свыше 20% от основной частоты может указывать на резонансные эффекты. В таких случаях алгоритмы FFT с окнами Кайзера обеспечивают баланс между разрешением по частоте и подавлением боковых лепестков, повышая точность оценки энергетического распределения сигнала.
Идентификация аномалий в сигнале term

Для точного выявления аномалий в сигнале term рекомендуется применять метод скользящего окна с длиной 1024 отсчета и перекрытием 50%. Расчет показателей среднего квадратического отклонения и коэффициента асимметрии позволяет фиксировать выбросы с вероятностью ошибки менее 2%. В критических процессах целесообразно дополнительно внедрять в реальном времени алгоритмы фильтрации Калмана, которые корректируют шумовые всплески и минимизируют ложные срабатывания детектора.
При анализе сигналов более 10^6 точек эффективным оказывается комбинированный подход: сначала применяют вейвлет-преобразование для выявления кратковременных пиков, затем – автокорреляционный анализ для обнаружения структурных аномалий. Рекомендуется накапливать статистику за 7–14 циклов работы процесса и строить динамические пороговые значения, что снижает вероятность пропуска скрытых отклонений до 0,5% и обеспечивает стабильность идентификации при изменении частотных характеристик сигнала.
Настройка пороговых значений для автоматических систем
Правильная установка пороговых значений критически важна для корректной работы автоматических систем обработки сигналов. Порог определяет момент, когда система реагирует на изменение параметра, например, амплитуды, частоты или длительности сигнала.
Первый шаг – анализ статистики входного сигнала. Рекомендуется вычислять среднее значение, стандартное отклонение и экстремумы за период не менее 10–15 циклов сигнала. Для сигналов с высокой изменчивостью стоит использовать скользящее среднее с окном в 5–10 измерений.
Следующий этап – выбор метода расчета порога. Чаще всего используют:
- Фиксированный порог – устанавливается на основе исторических данных и применяется для стабильных сигналов.
- Адаптивный порог – рассчитывается динамически с учетом текущих изменений амплитуды и частоты.
- Комбинированный подход – фиксированная основа с корректировкой адаптивными коэффициентами.
При настройке порога необходимо учитывать скорость отклика системы. Для критически важных процессов рекомендуется уменьшать задержку срабатывания до 50–100 мс, сохраняя при этом точность обнаружения событий выше 95%.
Оптимизация порога требует тестирования на контрольных сигналах с известными параметрами. Для систем обработки вибрации или акустических сигналов следует создавать набор из 50–100 типовых паттернов и проверять чувствительность и ложные срабатывания.
Автоматическая коррекция порогов должна включать ограничения на максимальные изменения за единицу времени. Например, увеличение порога не должно превышать 10% в течение одной минуты, чтобы избежать пропусков критических сигналов или ложных тревог.
Наконец, важно документировать выбранные значения порогов и логику их изменения. Это обеспечивает прозрачность работы системы, облегчает диагностику и позволяет при необходимости корректировать алгоритмы без полной остановки процесса.
Фильтрация шумов в реальном времени

Эффективная фильтрация шумов в процессах с сигналом TERM требует использования адаптивных алгоритмов, способных изменять коэффициенты фильтра в зависимости от спектрального состава входного сигнала. На практике применяют калмановские фильтры для линейных систем и Вейвлет-преобразование для нелинейных колебаний, что позволяет снижать амплитуду случайных пиков до 40–60% без искажения основной информационной составляющей.
Для реализации в реальном времени критично ограничить задержку обработки. Рекомендуется разбивать поток на блоки длиной 128–256 отсчетов с перекрытием 25%, что обеспечивает баланс между точностью фильтрации и временем отклика. Параметры оконной функции, например Хэмминга или Блэкмана, подбираются исходя из спектра шума: для широкополосного шума эффективнее короткие окна, для узкополосного – длинные.
Интеграция фильтров в системах управления процессами должна сопровождаться мониторингом метрик качества, таких как отношение сигнал/шум (SNR) и корреляция с эталонным сигналом. При достижении SNR выше 25 дБ и корреляции >0,95 дальнейшая фильтрация может приводить к излишней сглаженности. Оптимально комбинировать цифровую фильтрацию с аппаратной стабилизацией входного сигнала для минимизации артефактов в режиме реального времени.
Сравнение алгоритмов предсказания изменения сигнала

Для анализа сигнала term в реальных процессах наиболее эффективны три подхода: линейная регрессия с скользящим окном, модель авторегрессии ARIMA и рекуррентные нейронные сети LSTM. Линейная регрессия обеспечивает точность около 92% при коротких временных интервалах и малой волатильности, однако теряет эффективность при резких скачках. ARIMA показывает стабильную работу при периодических изменениях сигнала, снижая среднюю квадратичную ошибку до 0.015 единиц, но требует ручной оптимизации параметров (p, d, q) для каждого конкретного процесса. LSTM адаптируется к нелинейным зависимостям и предсказывает сигналы с ошибкой менее 0.01 единиц на горизонте до 50 шагов вперед, что делает её предпочтительной для процессов с высокой динамикой.
Практические рекомендации включают:
- Использовать линейную регрессию для краткосрочного мониторинга и сигналов с низкой шумовой составляющей.
- Применять ARIMA при периодических паттернах и доступности исторических данных не менее 500 точек.
- Выбирать LSTM при высокочастотных изменениях, нестабильной амплитуде и необходимости прогноза на несколько циклов процесса вперед.
- Комбинировать модели через ансамблевый подход, если требуется баланс точности и вычислительной эффективности – например, LSTM для ключевых изменений и ARIMA для базовой тенденции.
Вопрос-ответ:
Какие методы обработки сигнала term применяются для уменьшения шумов в производственных процессах?
Для снижения шумов в сигналах term используют фильтрацию на основе временных и частотных характеристик. Например, применяются скользящие средние и фильтры Калмана, которые позволяют сгладить колебания без существенного искажения полезного сигнала. В некоторых случаях используют вейвлет-преобразования, что особенно удобно для сигналов с быстрыми переходными процессами, когда важно отделить кратковременные помехи от основной динамики.
Как выбор метода обработки сигнала влияет на точность измерений в процессах?
Метод обработки напрямую влияет на достоверность получаемых данных. Например, методы с высокой временной фильтрацией могут устранять шумы, но одновременно сглаживать резкие изменения, что приводит к потере деталей динамики процесса. С другой стороны, адаптивные методы обработки могут сохранять важные колебания сигнала, улучшая точность определения характеристик процесса, но требуют более сложной настройки параметров и вычислительных ресурсов.
Можно ли использовать один метод обработки сигнала term для разных типов процессов?
Применение одного метода для различных процессов возможно, но эффективность будет зависеть от специфики сигнала. Например, фильтры низкой частоты хорошо подходят для процессов с медленной динамикой, но для быстрых реакций лучше использовать адаптивные или вейвлетные методы. Часто на практике применяют комбинацию нескольких подходов: базовую фильтрацию для удаления шума и последующую адаптивную обработку для точного анализа изменений сигнала.
Какие ошибки чаще всего возникают при обработке сигналов term, и как их избегать?
Частые ошибки включают чрезмерное сглаживание, игнорирование сдвига фаз и некорректную интерпретацию кратковременных выбросов. Избежать этих проблем помогает правильный выбор метода и настройка параметров под конкретный процесс. Например, перед фильтрацией полезно провести анализ спектра сигнала, чтобы определить диапазон частот шума и сигнала, а также учитывать возможные задержки, которые фильтры могут вносить в измеряемый сигнал.