Векторные операции являются ключевым инструментом в анализе физических процессов, компьютерной графике и машинном обучении. Для точных вычислений важна работа с компонентами вектора через матрицы и базисы, что позволяет быстро изменять координаты и оценивать взаимное расположение объектов.
Скалярное произведение используется для вычисления углов между векторами и проекций одного вектора на другой. Это важно при определении направления движения в симуляциях, оптимизации траекторий и расчёте силы взаимодействия в физике.
Векторное произведение применяется для нахождения нормалей к плоскости, оценки ориентации трёхмерных объектов и расчёта моментов сил. Использование этого метода упрощает проверку перпендикулярности и вычисление площади параллелограмма, образованного двумя векторами.
Матрицы позволяют проводить линейные преобразования: повороты, масштабирование и отражение векторов. Это используется при моделировании объектов в 3D, преобразовании координат в инженерных задачах и реализации алгоритмов компьютерного зрения.
Определение нормы вектора и проверка линейной зависимости помогают контролировать стабильность вычислений и выявлять избыточные данные. Применение базисов и переход к другим системам координат позволяет упрощать сложные задачи и ускорять вычислительные процессы.
Сложение и вычитание векторов через матрицы

Векторы можно представлять как столбцовые матрицы, где каждая строка соответствует компоненте. Сложение двух векторов u и v сводится к поэлементному суммированию их компонент: u + v = [u₁ + v₁, u₂ + v₂, …, uₙ + vₙ]. Такой подход позволяет использовать стандартные функции работы с матрицами в Python, MATLAB или Excel для автоматизации вычислений.
Вычитание векторов выполняется аналогично, путем вычитания соответствующих компонент: u — v = [u₁ — v₁, u₂ — v₂, …, uₙ — vₙ]. Это особенно удобно при обработке координат объектов в пространстве, когда требуется определить разницу положения или смещение.
Представление векторов в виде матриц упрощает работу с набором векторов: операции можно применять сразу к нескольким строкам или столбцам. Например, сложение двух наборов векторов размерности m×n выполняется через простое суммирование соответствующих элементов матриц, что ускоряет вычисления при моделировании физических систем.
При работе с большими массивами данных рекомендуется проверять совпадение размерностей матриц перед операциями. Несовпадение размерностей приводит к ошибкам и некорректным результатам, поэтому использование функций проверки shape в numpy или аналогичных инструментах является обязательной практикой.
Масштабирование векторов с помощью скаляров

Масштабирование вектора осуществляется умножением всех его компонент на одно число – скаляр. Если v = [v₁, v₂, …, vₙ] и k – скаляр, то результат вычисляется по формуле k·v = [k·v₁, k·v₂, …, k·vₙ]. Такой подход используется для изменения длины вектора без изменения его направления.
Применение масштабирования удобно при нормализации векторов или увеличении координат объектов в 3D-графике. В физических расчетах скаляр может соответствовать коэффициенту пропорциональности, например, силы или скорости.
Для наглядного понимания операций можно использовать таблицу:
| Вектор | Скаляр | Результат масштабирования |
|---|---|---|
| [2, 3, 4] | 3 | [6, 9, 12] |
| [1, -2, 0] | -2 | [-2, 4, 0] |
| [0, 5, 7] | 0.5 | [0, 2.5, 3.5] |
Перед выполнением масштабирования рекомендуется проверять размерность вектора и тип скаляра. Несоответствие типов может привести к неожиданным результатам при программной реализации операций.
Скалярное произведение для вычисления углов между векторами

Скалярное произведение двух векторов u = [u₁, u₂, …, uₙ] и v = [v₁, v₂, …, vₙ] вычисляется как u·v = u₁·v₁ + u₂·v₂ + … + uₙ·vₙ. Этот показатель позволяет определить угол между векторами с помощью формулы cosθ = (u·v) / (||u||·||v||), где ||u|| и ||v|| – нормы векторов.
Применение скалярного произведения важно при оценке направлений в 2D и 3D графике, робототехнике и физике. Например, при проектировании движения робота проверка угла между траекторией и препятствиями позволяет избежать столкновений.
Для вычислений рекомендуется предварительно нормировать векторы, чтобы уменьшить погрешности при делении на их длины. В программных библиотеках типа numpy или MATLAB скалярное произведение вычисляется встроенными функциями, что сокращает количество ошибок в коде.
Пример вычисления угла:
Векторы: u = [1, 2, 2], v = [2, 0, 1]
Скалярное произведение: u·v = 1·2 + 2·0 + 2·1 = 4
Нормы: ||u|| = √(1²+2²+2²) = 3, ||v|| = √(2²+0²+1²) ≈ 2.236
Угол: θ = arccos(4 / (3·2.236)) ≈ 53.1°
Векторное произведение в трёхмерном пространстве
Векторное произведение двух векторов u = [u₁, u₂, u₃] и v = [v₁, v₂, v₃] создаёт новый вектор w = u × v, перпендикулярный к плоскости, образованной u и v. Его компоненты вычисляются по формуле:
- w₁ = u₂·v₃ − u₃·v₂
- w₂ = u₃·v₁ − u₁·v₃
- w₃ = u₁·v₂ − u₂·v₁
Использование векторного произведения позволяет:
- Нахождение нормали к плоскости, что важно при построении 3D моделей и графических движков.
- Вычисление момента силы относительно точки, используя формулу M = r × F, где r – радиус-вектор, F – сила.
- Проверку ортогональности векторов: если u × v = 0, векторы коллинеарны.
- Определение площади параллелограмма, образованного двумя векторами: S = ||u × v||.
Для программной реализации рекомендуется использовать встроенные функции библиотек, таких как numpy.cross, чтобы избежать ошибок при ручных вычислениях и ускорить обработку больших массивов данных.
Использование матриц для поворота и отражения векторов

Поворот вектора реализуется через умножение на матрицу вращения. Для 2D координат вектор v = [x, y] преобразуется с помощью матрицы R(θ) = [[cosθ, -sinθ], [sinθ, cosθ]], где θ – угол поворота. Результат v’ = R(θ)·v содержит новые координаты после поворота.
В 3D применяются отдельные матрицы для каждой оси:
- Поворот вокруг X: Rx = [[1,0,0],[0,cosθ,-sinθ],[0,sinθ,cosθ]]
- Поворот вокруг Y: Ry = [[cosθ,0,sinθ],[0,1,0],[-sinθ,0,cosθ]]
- Поворот вокруг Z: Rz = [[cosθ,-sinθ,0],[sinθ,cosθ,0],[0,0,1]]
Отражение вектора выполняется через диагональные матрицы с элементами 1 и -1. Например, отражение относительно оси X в 2D: Rx = [[1,0],[0,-1]], в 3D отражение комбинируется по нужной плоскости с помощью изменения знаков соответствующих компонентов.
Перед применением преобразований важно проверять размерность вектора и матрицы. Для работы с большим количеством векторов рекомендуется использовать встроенные функции матричного умножения в библиотеках, например numpy.dot, чтобы ускорить вычисления и снизить вероятность ошибок.
Определение длины и нормы вектора
Длина вектора, или его норма, вычисляется как квадратный корень суммы квадратов всех компонент. Для вектора v = [v₁, v₂, …, vₙ] формула имеет вид: ||v|| = √(v₁² + v₂² + … + vₙ²). Норма используется для оценки величины вектора и нормализации.
Нормализация вектора переводит его в единичный вектор с длиной 1, сохраняя направление:
- Выбирается вектор v
- Вычисляется норма ||v||
- Каждая компонента делится на норму: v’ = v / ||v||
Использование норм важно для:
- Вычисления углов между векторами через скалярное произведение без влияния масштаба.
- Моделирования движения объектов, где требуется единичная скорость или направление.
- Сравнения величин векторов при анализе данных в многомерных пространствах.
При программной реализации рекомендуется проверять, что норма не равна нулю, чтобы избежать деления на ноль. В библиотеках типа numpy для вычисления нормы используется функция numpy.linalg.norm(v), что упрощает обработку больших массивов векторов.
Проверка линейной зависимости векторов

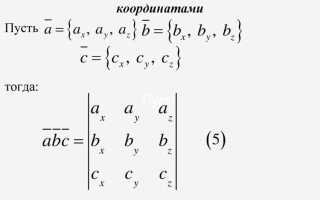
Векторы считаются линейно зависимыми, если один из них может быть выражен через линейную комбинацию остальных. Для векторов v₁, v₂, …, vₙ проверка проводится через составление матрицы, где строки или столбцы соответствуют компонентам векторов, и вычисление её ранга.
Если ранг матрицы меньше числа векторов, значит, они линейно зависимы. Для трёхмерных векторов можно использовать детерминант 3×3 матрицы: det([v₁ v₂ v₃]) = 0 указывает на зависимость.
Практические рекомендации:
- Для больших наборов векторов используйте функцию numpy.linalg.matrix_rank() для проверки линейной зависимости.
- Перед вычислениями нормализуйте векторы, чтобы избежать численных ошибок при работе с малым масштабом компонент.
- При работе с геометрическими задачами проверка зависимости позволяет выявлять коллинеарные или копланарные объекты.
Использование линейной зависимости помогает оптимизировать хранение данных и уменьшить избыточность при вычислениях с множественными векторами.
Применение базиса и координатных преобразований

Базис определяет систему координат, в которой задаются векторы. Любой вектор v может быть представлен как линейная комбинация базисных векторов e₁, e₂, …, eₙ: v = c₁·e₁ + c₂·e₂ + … + cₙ·eₙ, где c₁, c₂, …, cₙ – координаты вектора в этом базисе.
Координатные преобразования выполняются через умножение на матрицу перехода между базисами. Если P – матрица перехода из базиса B в базис B’, то новые координаты вычисляются как v’ = P·v. Это позволяет:
- Упрощать вычисления, выбирая удобный базис для конкретной задачи.
- Преобразовывать данные между различными системами координат, например, глобальной и локальной в 3D моделировании.
- Оптимизировать хранение и обработку векторов при работе с большими массивами данных.
При программной реализации рекомендуется использовать проверку обратимости матрицы перехода, чтобы исключить потерю информации. В библиотеках типа numpy умножение на матрицу выполняется функцией numpy.dot(P, v), что ускоряет преобразования и снижает вероятность ошибок.
Вопрос-ответ:
Как использовать скалярное произведение для нахождения угла между двумя векторами?
Скалярное произведение двух векторов u и v вычисляется как сумма произведений их соответствующих компонент: u·v = u₁·v₁ + u₂·v₂ + … + uₙ·vₙ. Чтобы определить угол θ между векторами, применяется формула cosθ = (u·v) / (||u||·||v||), где ||u|| и ||v|| — длины векторов. В практических вычислениях удобно сначала нормализовать векторы, что упрощает деление и уменьшает погрешности.
В чем разница между скалярным и векторным произведением?
Скалярное произведение возвращает число, показывающее степень сонаправленности векторов и используется для вычисления углов и проекций. Векторное произведение применимо только в трёхмерном пространстве и создаёт новый вектор, перпендикулярный к плоскости исходных векторов, что удобно для нахождения нормалей, моментов сил и площади параллелограмма.
Как проверить линейную зависимость нескольких векторов в пространстве?
Для проверки линейной зависимости составляют матрицу, где строки или столбцы соответствуют компонентам векторов, и вычисляют её ранг. Если ранг меньше числа векторов, значит, хотя бы один вектор выражается через другие. Для трёх векторов в 3D можно использовать детерминант 3×3 матрицы: если det = 0, векторы линейно зависимы. В программных библиотеках применяют функцию numpy.linalg.matrix_rank().
Как применяются матрицы для поворота и отражения векторов?
В 2D векторы поворачиваются через умножение на матрицу R(θ) = [[cosθ, -sinθ], [sinθ, cosθ]]. В 3D используются отдельные матрицы для осей X, Y, Z. Отражение выполняется через диагональные матрицы с элементами 1 и -1, изменяющими знак компонентов вектора. При работе с набором векторов применяется матричное умножение, что ускоряет расчёты и снижает вероятность ошибок.
Зачем нужно нормализовать вектор и как это сделать?
Нормализация переводит вектор в единичный, сохраняя направление и устанавливая длину равной 1. Для вектора v нормализованный вектор вычисляется как v’ = v / ||v||, где ||v|| — длина вектора. Нормализация полезна при сравнении направлений, вычислении углов и в графических или физических моделях, где требуется одинаковая величина векторов.
Как использовать матрицы для изменения направления и масштаба вектора в 3D пространстве?
Для изменения направления вектора применяются матрицы вращения. В 3D создаются отдельные матрицы для осей X, Y и Z: Rx, Ry, Rz. Умножение вектора на соответствующую матрицу изменяет его координаты в пространстве, сохраняя длину, если матрица ортогональна. Масштабирование выполняется через диагональные матрицы, где на главной диагонали стоят коэффициенты изменения каждой компоненты. Например, для увеличения x в 2 раза и уменьшения y в 3 раза матрица будет [[2,0,0],[0,1/3,0],[0,0,1]]. Перед применением операций необходимо проверить размерность вектора и матрицы, чтобы избежать ошибок в вычислениях. Использование таких преобразований удобно при моделировании движения объектов, построении 3D графики и физическом анализе.